机の上で、動画を一本まるごと作った。題材は、6軸の協働ロボット。工場でおなじみのあの腕が、なぜ毎回0.03ミリという精度で同じ場所にピタッと止まれるのか──その仕組みを、寸法を出すFusion 360、絵と動画にするBlender、それらを言葉で動かすClaudeだけで、縦型のショート動画にした。
お手本の「型」を分解するところから
参考にしたのは、身近で激しい現象を使って機械の原理を一発で見せる科学解説ショートだ。筒の中で爆竹を鳴らしてエンジンの仕組みを見せる、あの直感的なやり方。フック→問い→たとえ→正体→締めという流れを、そっくりロボットの話に翻訳することから始めた。
大事なのは、難しい言葉を使わないこと。専門用語をそのまま並べず、誰でも知っている動きや感覚に言い換える。この「翻訳」が解説動画の生命線になる。
台本と、ナレーションの声
まず16個のカットに割って、各カットのナレーションを書いた。最初は精度を「0.1ミリ」と書いていたが、最近の協働ロボットの繰り返し精度は0.03ミリほど。事実に合わせて数字を直した。動画の数字は、ここをいい加減にすると一気に信用を失う。
声は無料の音声合成で付けた。キャラクターごとに声を選べるので、聞き取りやすい声に差し替え、語尾は普通の会話体に整えた。合成した音声の長さに合わせて、各カットの尺を自動で調整している。

関節の「中身」を、Fusionで実寸から起こす
この動画の一番の肝が、ここだ。爆竹を筒の中で爆発させて見せたように、ロボットも関節の殻を割って中身を見せる。中に入っているのは、モーター・回った量を読むエンコーダ・力を増やす減速機の歯車・次の腕につながる出力フランジの4つ。これらを実物の寸法に合わせてFusionで作り、部品ごとに書き出した。
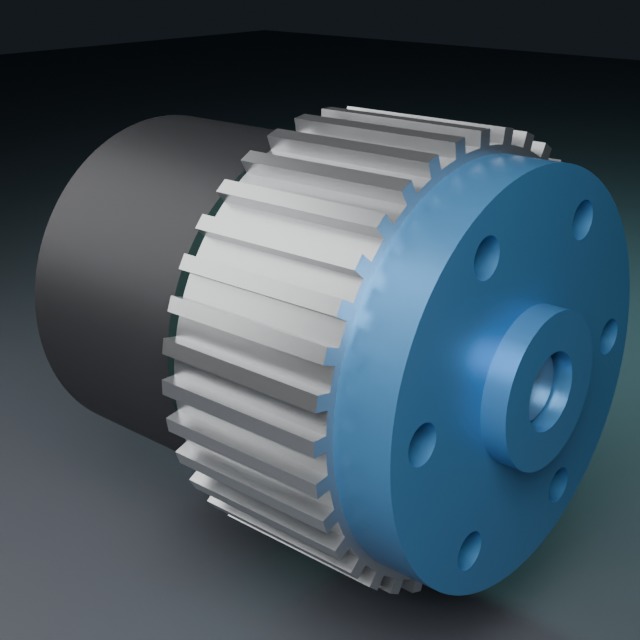
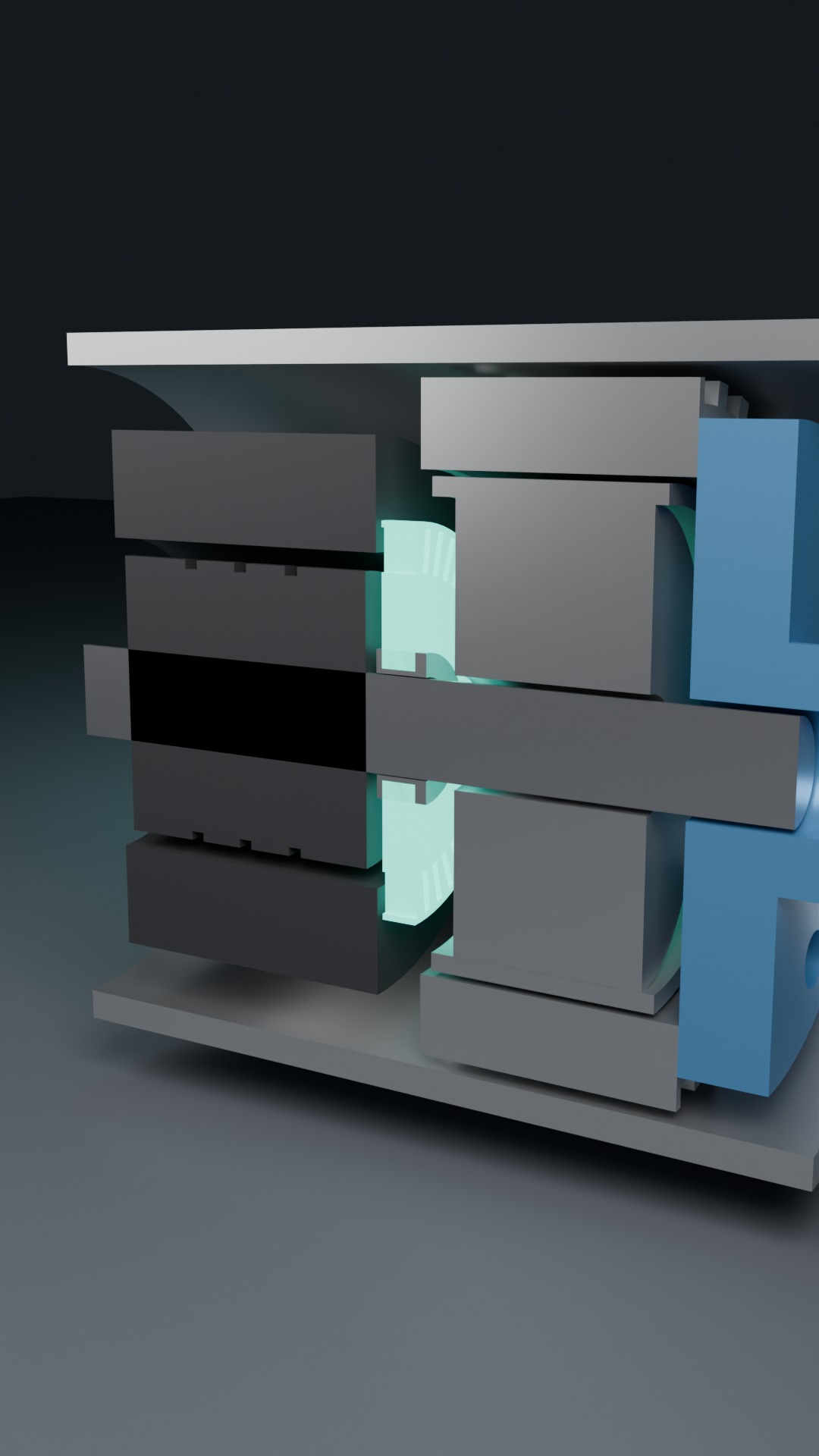
Blenderで、実機の殻を割った断面にする
協働ロボットの外側のかたちは公開メッシュから持ってきたが、中身は空っぽだ。そこで先ほどの部品を中に入れ、Blenderで殻を縦に割った断面を作った。モーターは黒、エンコーダは目立つティール、減速機はスチール、出力は青、と色で役割を分けて、断面でも一目で分かるようにしている。さらに歯車やエンコーダが回って止まる動きも付けた。
止まれる正体は「自分の位置を正確に知っている」こと
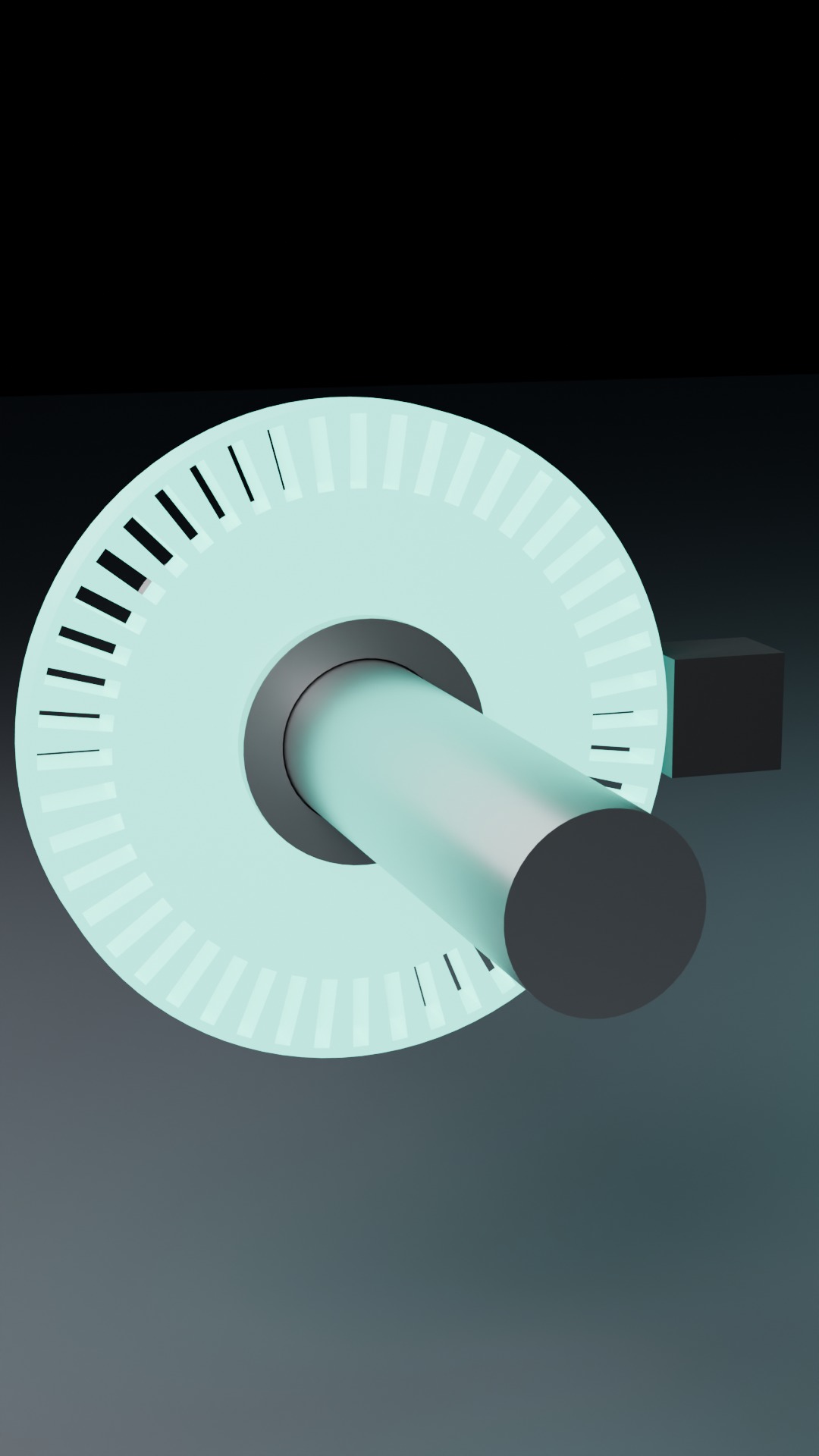
ロボットが0.03ミリで止まれる正体は、関節の中のエンコーダにある。これは、軸が今どの角度にいるかを、細かい目盛りの円盤で正確に読み取る部品だ。人は目をつぶると自分の手の位置を見失うが、ロボットは自分の位置をいつでも正確に分かっている。だから、狙った一点で止まれる。動画では「目隠しで階段を一段ずつ数えて、決めた段で止まる」たとえと、目盛り盤が回るアップで見せた。
あとは、その読み取った位置を目標と毎秒数千回くらべて、行き過ぎていたらすぐ少し戻すだけだ。つまり一度でピタリと当てているのではなく、ズレを細かく直し続けて止まっている。位置を正確に知るエンコーダと、それを直す細かい調整。この二つがそろって、0.03ミリが出る。
お手本との差を、最後に埋める
一度完成させてから、お手本の動画と並べて見比べた。足りなかったのは演出だ。効果音(数えるカチッ、止まるピタッ)、数字を黄色で強調、カットの切り替えに白いフラッシュ。そしてマスコットの常駐。マスコットには、別で作ってある工場の3Dキャラクターをぴょこぴょこ動かして、画面の隅に置いた。技術より、この「気持ちよさ」の積み重ねが、見やすさを大きく変えた。
補足:今回の音声は無料の合成音声を使っている。テキストを入れるだけでキャラクターの声で読み上げてくれて、長さも数値で取れる。動画の尺合わせやテロップ作りを自動化しやすく、ナレーション付きの解説動画と相性が良い。
AIと3D CADで、ここまで作れる
図面から寸法を読む知識、3Dで部品を起こす作業、声、効果音、動画の合成──本来はバラバラの工程を、Claudeとの共同作業で一本の動画に通せた。机の上に、初めて「見れば分かる」解説動画が一本できた。次は題材を変えて、同じ型でシリーズにしていきたい。図面から起こし、動かし、伝える。その積み重ねを、これからも記録していく。


コメント