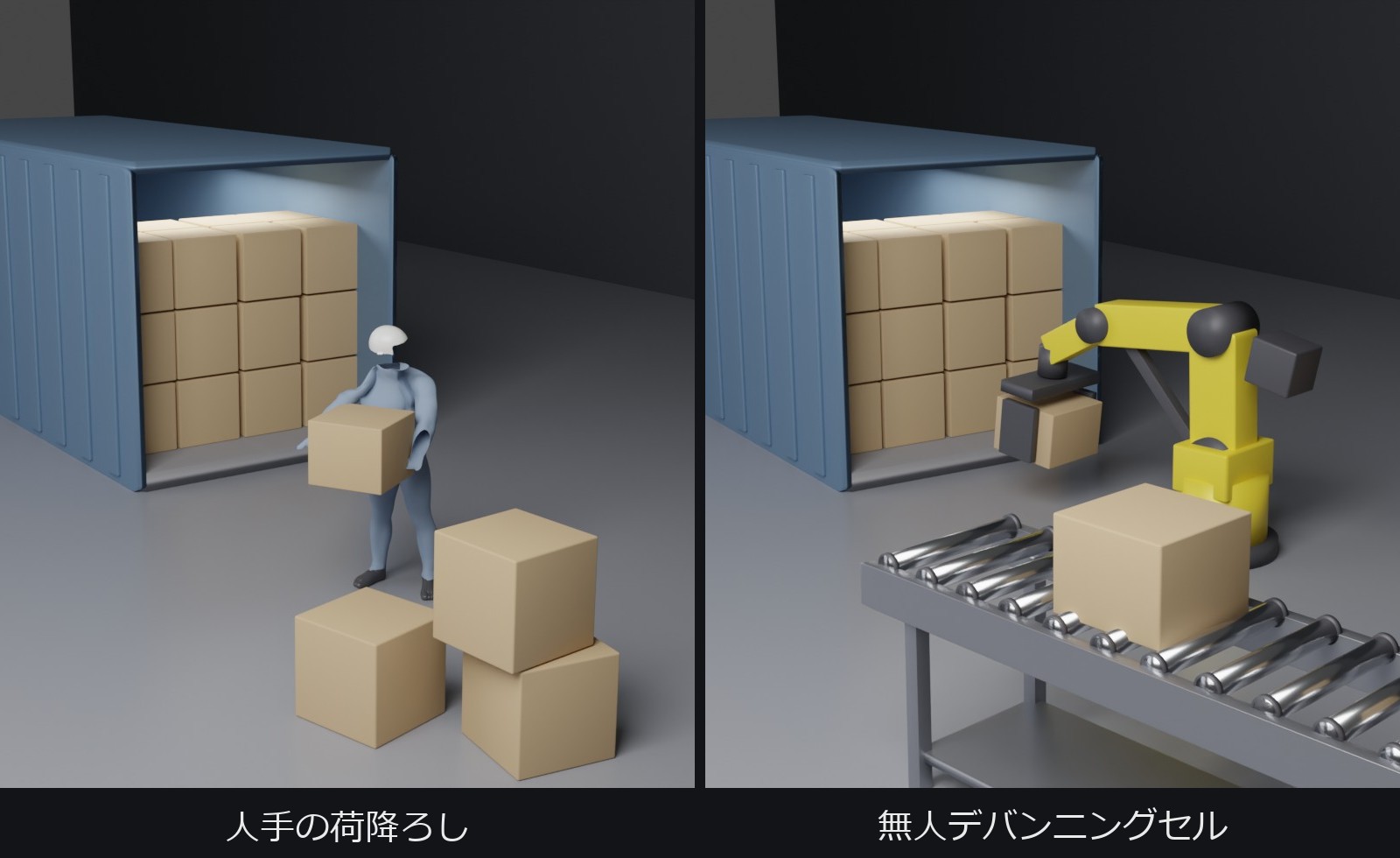
40フィートのコンテナひとつに、段ボールがびっしり1,000箱。これを人の手で、かがんで、抱えて、運んで、また戻る。夏のコンテナ内は40度を超える。荷降ろし(デバンニング)は、いまも多くの現場で一番きつい工程として残っている。
このお題はシンプルだ。「コンテナの荷降ろしを、ロボット化するには?」。今回は、その現場をまるごと絵に起こし、どのロボットを・どう並べ・いくらで入れるかまでを一枚の提案にした。
なぜ、ここを自動化するのか
理由は精神論ではなく、数字に出ている。厚生労働省の2023年(令和5年)の集計では、「動作の反動・無理な動作」による腰痛だけで22,053人が被災している。とくに荷を扱う陸上貨物の腰痛発生率は1,000人あたり0.41で、全産業平均0.1の4倍を超える。製造業でも重量物の取り扱いは腰痛の主因で、国は「重量物作業の自動化・機械化」を予防策の筆頭に挙げている。
つまり荷降ろしの自動化は、生産性の前に人の体を守る投資だ。そこに人手不足が重なり、「この工程を誰がやるのか」という配置の悩みそのものが、現場の重しになっている。
① どのロボットを選ぶか
荷降ろしの主役は、可搬20〜35kgクラスの重可搬ロボットだ。今回の提案では、安全柵なしで人と並んで置ける協働ロボットを軸にした。理由は3つ。
- 狭い荷役スペースに据えられる(安全柵のスペースが要らない)
- 人と同じ空間で働ける(検品の人とすぐ隣で分担できる)
- 段階的に入れられる(中小規模でも1台から始められる)
これに、箱の山を見分ける3Dビジョンと、上から吸い付く真空グリッパ、動ける移動台車を足す。実機では川崎重工の「Vambo」(最大600個/時・30kgまで対応)やXYZ Roboticsの「RockyOne」(40ftを1.5〜2時間で荷降ろし)といった専用機が同じ役割を担う。
どの型式が自社の条件(コンテナ寸法・箱重量・タクト)に足りるかは、選定ツールで客先条件を入れて当たりをつけられる。→ 協働ロボ選定アプリへ。
② 工程・動線:今 → ロボット化後
- 今:作業者2〜3名がコンテナ内に入り、かがんで箱を抱え、外へ運び、仕分ける。腰と背中に負担が集中し、夏は高温。繁忙期は属人化する。
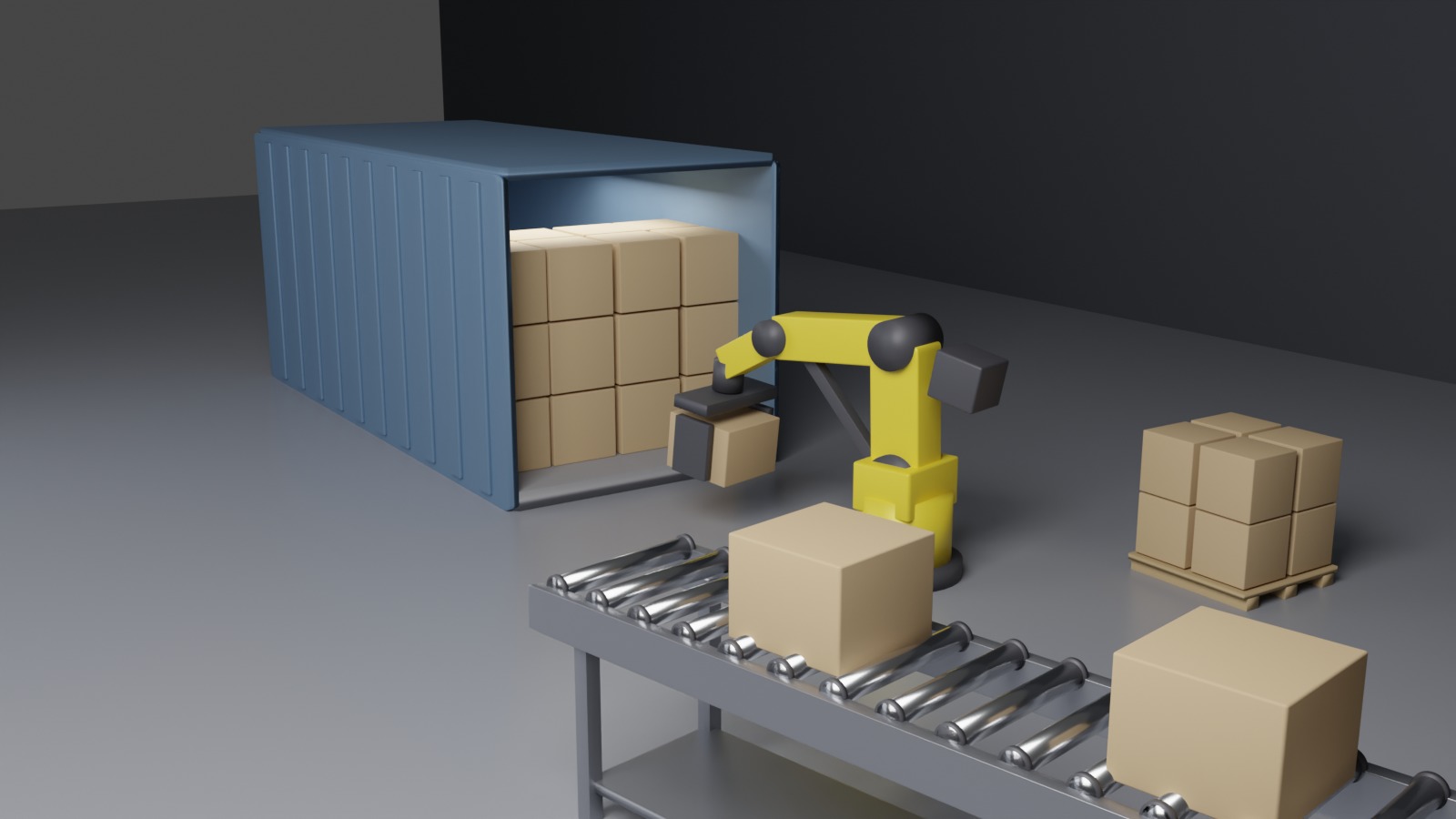
- ロボット化後:伸縮コンベヤをコンテナの奥へ伸ばし、ロボットが箱を取ってコンベヤに載せる。箱はそのままセル側へ流れ、仕分け・パレタイズへ。人は検品と例外対応の1名に減る。
ここで一つ、現実的な制約をはっきりさせておく。アーム1台のリーチは約1.8m。コンテナの奥(数m〜十数m)には、その場からは届かない。だから実機は、ロボットを台車に載せ、伸縮コンベヤとセットで少しずつ前進させる。アームは常に「目の前の一面(ワーキングフェイス)」だけを崩し、面が空いたらセルごと一歩前へ。これを繰り返してコンテナを空にする。「奥まで届く長い腕」ではなく、「前進しながら手前から片付ける」のが、デバンニングの正しい設計になる。
ポイントは、ロボットは人より速いわけではないということだ。デバンニングロボットの処理能力は1時間あたり300〜600箱。人の瞬間最高速が勝つ場面もある。ロボットの価値は「速さ」ではなく「休まず・一定で・腰を痛めずに」続けられることにある。
③ レイアウト
動線は一直線にした。コンテナ → 伸縮コンベヤ → ロボット → 仕分け・搬送 → パレタイズ → 出荷。人とロボットが同じ空間で働くため、協働の安全エリアを床にはっきり区切り、検品者の立ち位置は動作範囲の外に置く。こうして現場を可視化すると、コンベヤの伸び代・ロボットのリーチ(約1.8m)・通路幅が破綻しないかを、入れる前に目で確かめられる。
④ コスト・効果(概算)
導入規模の目安はこうだ。
- システム概算 1,000〜1,800万円。一般にロボット導入は工程しだいで1,000〜5,000万円。実例ではトータル1,500万円のうちロボット本体は400万円、残り1,100万円が周辺装置とシステム構築という内訳になる。荷降ろしは「ロボット単体」より、ビジョン・グリッパ・コンベヤ・据付を含めたセットで見るのが正しい。
- 効果:人手2〜3名 → 1名。腰痛・熱中症リスクの高い工程から人を外せる。夜間・連続でも一定ペース。40ftコンテナの荷降ろしを外注すると1本あたり27,000〜30,000円かかるため、入荷量が多い現場ほど内製化の効果が積み上がる。
数字は前提しだいで動く。自社の「コンテナ本数 × 箱重量 × 必要タクト」を入れて、回収年数まで詰めるのが次の一手になる。
まとめ
コンテナの荷降ろしは、「速さ」で人と競わせる工程ではなく、「人の体と人手不足」をロボットに肩代わりさせる工程だ。可搬25kgクラスの協働ロボットに、ビジョン・真空グリッパ・伸縮コンベヤを足し、安全エリアを切った一直線の動線。これが、今の技術で現実的に組める形になる。
- ショート動画で全体像をつかむ → (公開後リンク)
- 前回のエピソード → 大型旋盤のワーク着脱をロボット化する(門型ガントリーローダー)
- 自社条件で型式を当てる → 協働ロボ選定アプリ


コメント