机の上で、架空の工場を一台ずつ建てている。寸法を正確に出すFusion 360、絵と動画にするBlender、その二つを言葉で動かすClaudeだけで作る、図面も部品も実在しない工場だ。今回はそこに、メーカーが公開している協働ロボットの外形寸法図から起こした6軸のロボットアームを置き、関節で動かして20秒の動画にした。
メーカーの外形寸法図から、6軸ロボットを起こす
出発点は、メーカーが公開している協働ロボットのカタログだ。そこに載っている外形寸法図を読み、軸の数、最大リーチ(腕の届く距離)、先端の取付面の寸法を拾った。図面を1枚ずつ画像にして、数字を一つずつ確かめていく。
ただし外形図は、ロボットが届く範囲(包絡線)を示すのが主役で、腕の内部の細かい寸法までは載っていない。そこで、読み取った最大リーチを上腕・前腕・手首に振り分け、届く範囲がカタログと合うように組み立てた。実物の図面から3Dを起こすときの、現実的な進め方だ。
関節を面取りし、手首を「らしく」作り込む
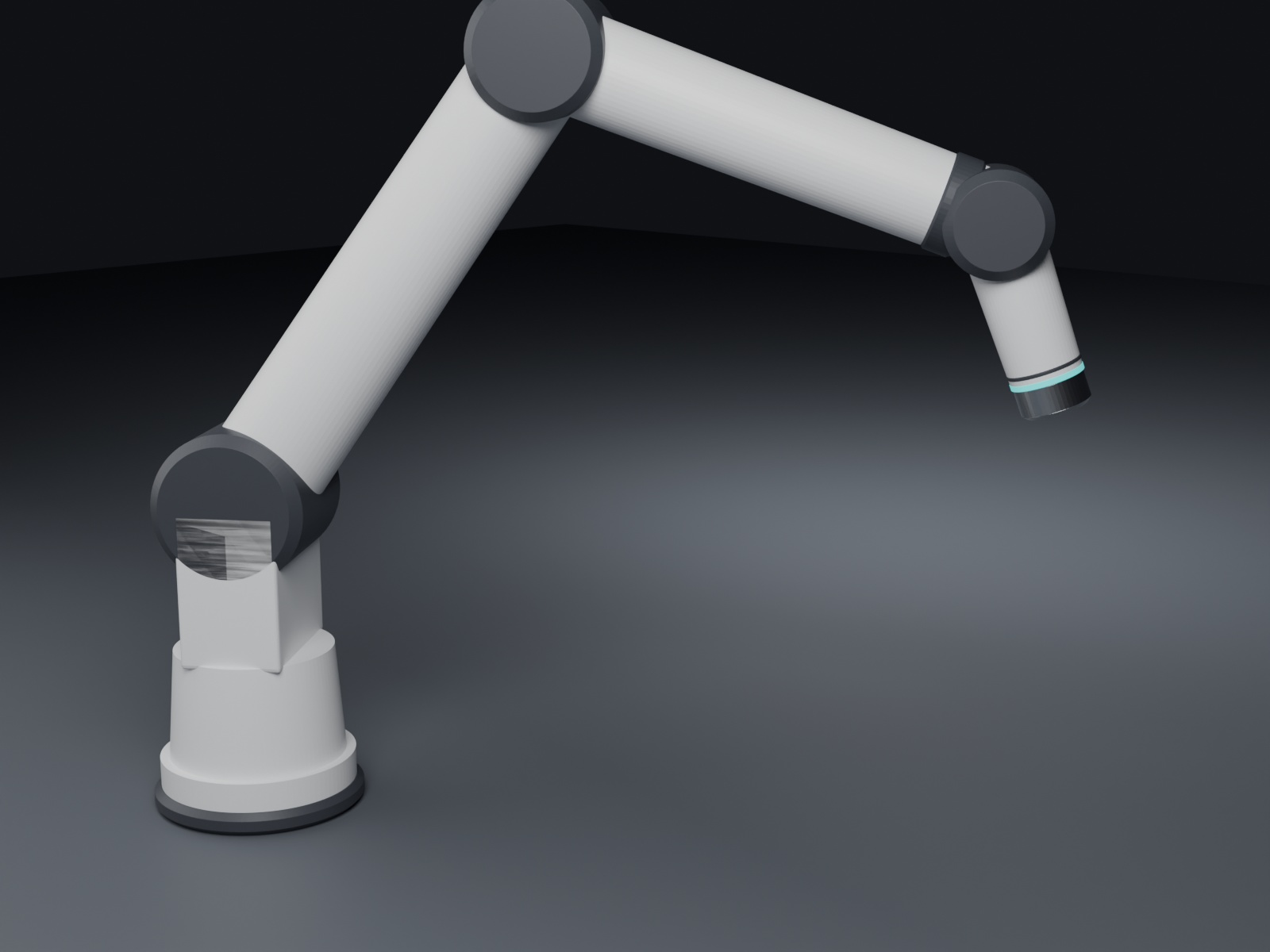
最初に組んだ腕は、関節が角ばっていて少しおもちゃっぽかった。実機の関節カバーは、縁が斜めに削られている。これを面取りと呼ぶ。そこでFusionの段階で、関節の縁を45度に面取りして、丸みと精密感を出した。
手首も、一本の筒のままでは物足りない。実機の手首は、ひねる・曲げる・先端の取付フランジ、と役割の違う部分が段になっている。そこを段付きで作り分け、手首が「く」の字に曲がる姿勢にしたところ、ぐっと本物らしくなった。
腕を関節で動かすリグにする
動かすために、腕を関節ごとに分けた入れ子の構造につないだ。土台の旋回、肩、肘、手首──それぞれが独立して回るようにしてある。こうした仕組みをFK(順運動学)のリグと呼ぶ。
一度この形にすれば、あとは関節の角度を時間に沿って指定するだけで腕が動く。順番が肝心で、まず形をすべて組み、次に関節をつなぎ、最後に角度をつける。逆にすると、つないだ瞬間に腕がねじれて崩れてしまう。
20秒の動画にして、小さくBGMを添える
動きは8つの場面に振り付けた。左右に振る、しゃがんで取る、反対側へ運ぶ、置く、手首を振る、伸び上がる、畳む、元に戻る。一つの単調な往復ではなく、作業しているように見える変化をつけた。
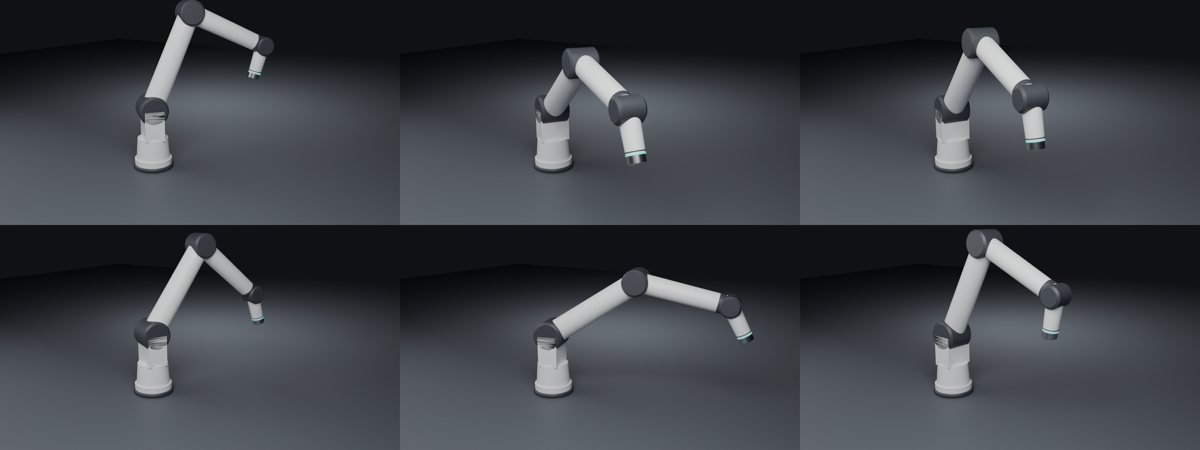
これを20秒・600コマとして、Blenderで一枚ずつ描いた。ここで一つ引っかかった。使っていたBlenderは、動画を直接書き出せない設定だったのだ。そこで静止画を600枚そろえてから、別のツールでつないで動画にした。BGMは、簡単な和音とアルペジオを自分で合成し、小さな音で添えている(著作権フリー)。
補足:3DソフトやCADは、必ずしも動画を直接出力できるとは限らない。今回のように静止画を連番で書き出し、外部のツールでつないで動画にする方法を知っておくと、環境に左右されずに映像までたどり着ける。
机の上のロボットが「動いた」
公開情報である外形図から、寸法の合う3Dを起こし、関節をつけて動かし、音まで添える。ここまでを、Claudeとの共同作業で一度に通せた。机の上の工場に、初めて「動くもの」が入った。
次は、この腕に箱をつかんで運ぶ動作を入れ、すでに作ってある搬送ラインと組み合わせたい。図面から起こし、動かし、つなげる。その積み重ねを、これからも一本ずつ記録していく。

コメント