「工作機械の仕事にAIを載せたいが、何から触ればいいか分からない」。FAや工作機械の現場に入った若手から、最近よく聞く声だ。CAMの自動化、サーボ調整の最適化、図面検索。選択肢は急に増えたが、どれが自分の状況に合うかは別の話になる。
結論を先に言う。いきなり高価なCAMの新機能に飛びつくより、手元のG-codeやマクロを汎用AIで触るところから始めた方が、若手は遠回りしない。理由は単純で、初期コストがほぼゼロで、しかも「AIに任せていい仕事」と「人が握るべき仕事」の線引きを体で覚えられるからだ。
この記事は「AIで工作機械の仕事が全部変わる」とは言わない。逆に、寸法・材料・G-codeはひとつの誤りが工具の破損や加工不良に直結する世界だ。だからこそ、何が自動化できて、どこは人が最終確認すべきかを、5つの選択肢を5軸で並べて構造的に整理する。煽りではなく、選び方の話をする。
1. 工作機械×AIの5つの選択肢を5軸で並べる
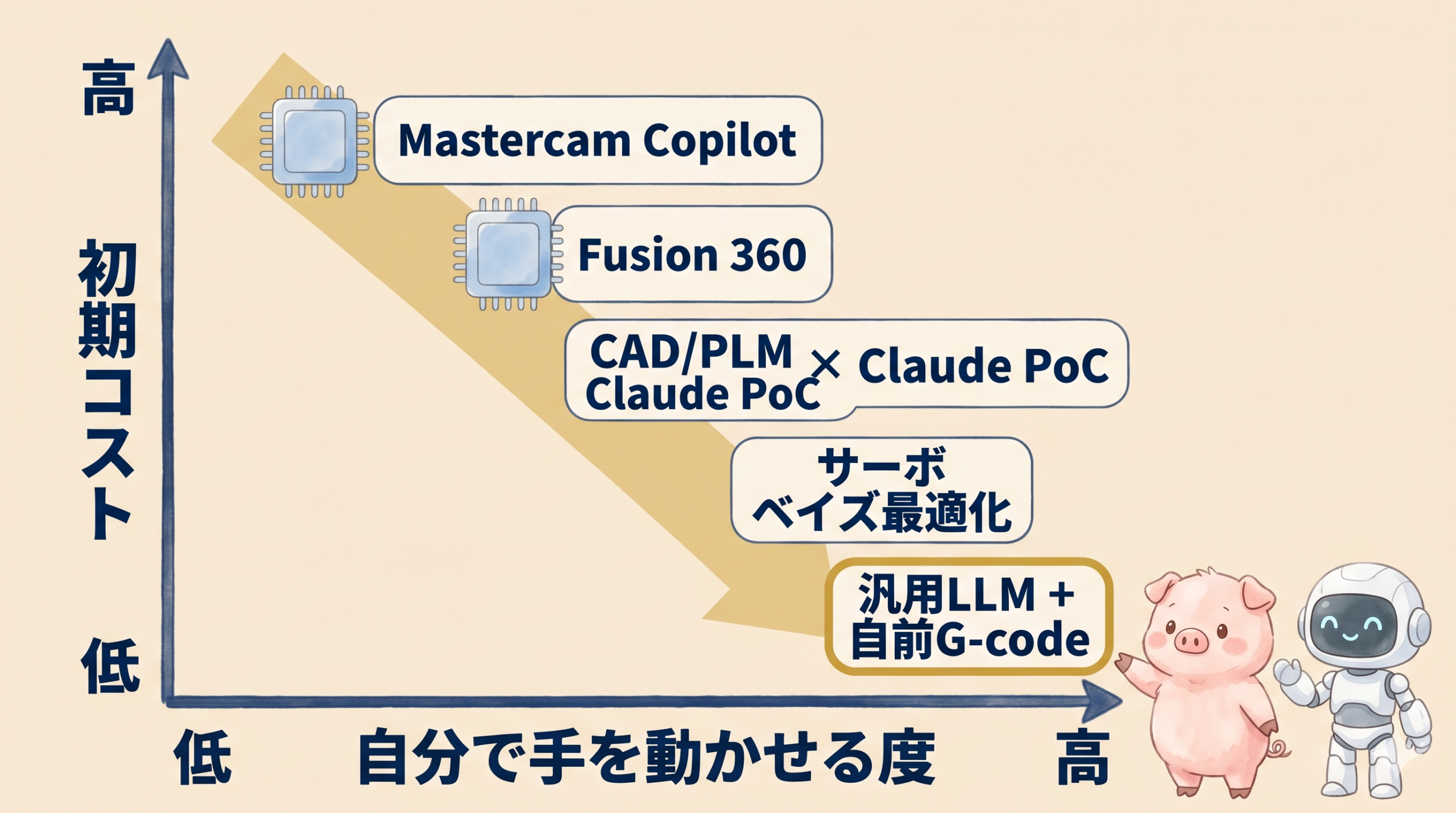
「工作機械にAIを入れる」とひとくくりにすると動けない。実際には、対象とする工程も、必要なスキルも、かかるお金もまるで違う。まず代表的な5つの選択肢を、若手が選びやすい5つの軸で横並びにする。下の表が出発点だ。
| 選択肢 | 初期コスト感(想定) | 月額・ランニング(想定) | 何が自動化されるか | 自分で手を動かせる度 | 日本語対応 |
|---|---|---|---|---|---|
| Mastercam Copilot | 高(既存CAMライセンス前提) | 保守契約に上乗せ | 加工パスの生成・最適化の提案 | 中(CAM操作の素地が要る) | UIは日本語あり |
| Fusion 360 のAI/クラウドCAM | 低〜中(個人・少額から) | サブスク月額 | クラウド演算でのパス生成・トルパス自動化 | 高(個人で全部触れる) | 日本語UIあり |
| 汎用LLM+自前G-codeスクリプト | ほぼゼロ | 無料〜数千円/月 | ポスト処理・マクロ・G-code補助生成 | 非常に高い(全部自分) | ChatGPT/Claudeとも対応 |
| サーボ調整のAI/ベイズ最適化 | 低(Python環境のみ) | ほぼゼロ(自前実装) | ゲイン等のパラメータ探索 | 高(コードを書ける人向け) | ライブラリは英語中心 |
| CAD/PLM×Claude の小規模PoC | 低〜中(API実費) | API従量+環境費 | 図面・部品表の検索/要約 | 高(自分で組む) | Claudeは日本語良好 |
表の数値はすべて想定値で、メーカーの公式価格表に基づく断定ではない。CAMの正確な金額は販売代理店の見積りで大きく変わるため、ここでは「桁感」として読んでほしい。
この5つを眺めて気づくのは、初期コストと「自分で手を動かせる度」がきれいに反比例している点だ。Mastercam Copilotは既存の高価なCAM資産が前提になるぶん、若手が個人の裁量で触れる範囲は狭い。逆に汎用LLM+自前スクリプトは、お金はほぼかからず、代わりに全部を自分の手で組むことになる。
もうひとつ大事な軸が、表には入れきれなかった安全面だ。CAMやG-codeが扱うのは、実際に金属を削る工具の動きそのものだ。ベイズ最適化が探るのはサーボのゲインで、外せば機械が振動したり位置決めを外したりする。つまりどの選択肢を選んでも、AIの出力を人が検証する工程は絶対に外せない。この前提を頭に置いた上で、次から各選択肢を1つずつ深掘りする。
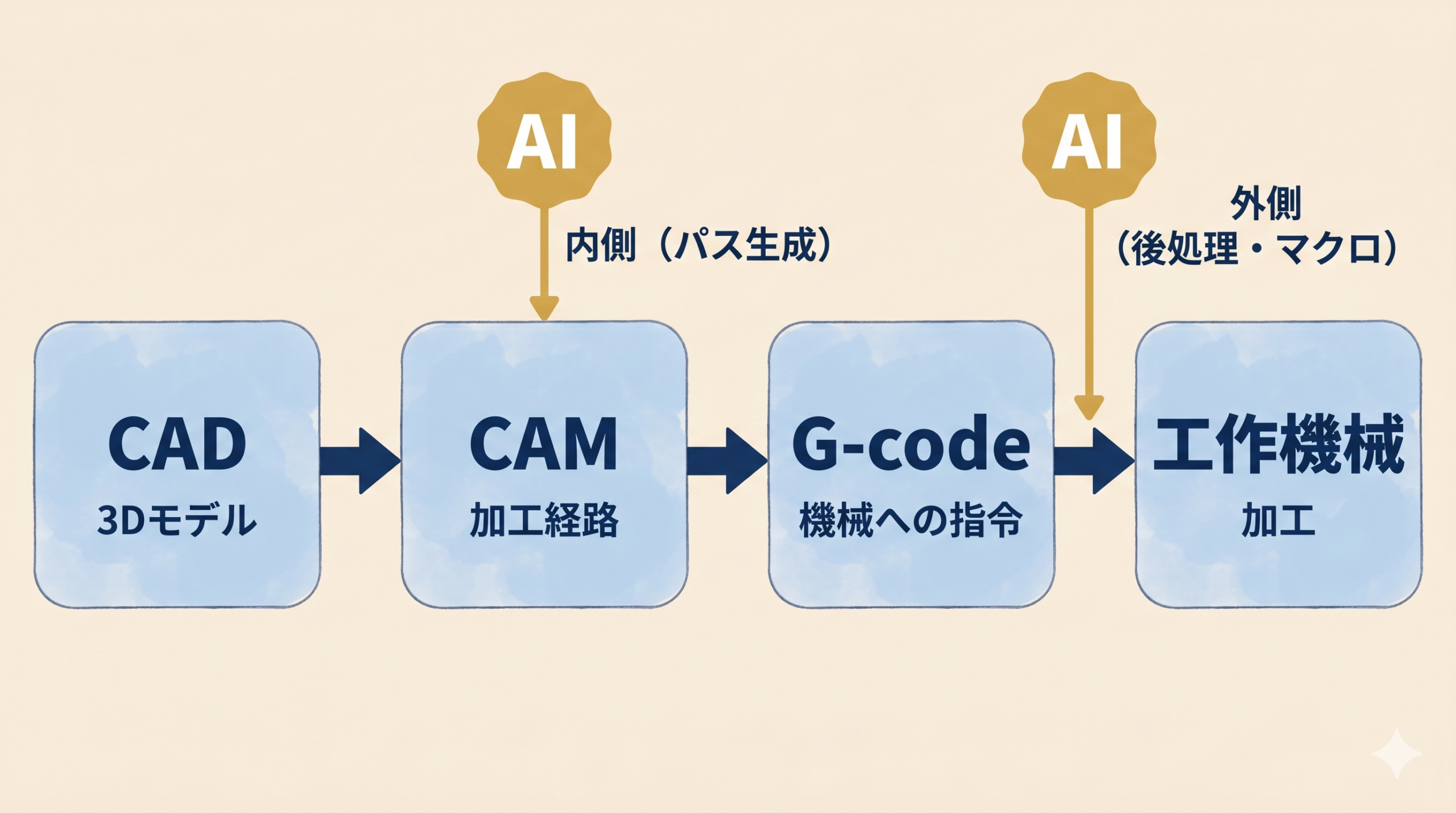
CAMとは Computer Aided Manufacturing の略で、CADで描いた3Dモデルから、工作機械を動かすための加工経路(工具がどう動くか)を作るソフトのこと。その出力がG-code、つまりNC工作機械への指令の言語だ。これから工作機械の現場に入る人にとって、CAMとG-codeの関係は最初に押さえる土台になる。AIはこのCAMの内側(パス生成)にも、出力されたG-codeの外側(後処理やマクロ)にも入ってくる。どちらの層を触っているのかを意識できると、選択肢の違いが一気に見通せるようになる。
2. Mastercam Copilot ― CAMの内側にAIが入る本命
工作機械×AIの「正面玄関」が、CAM大手のMastercamが2026年に投入したCopilotだ。位置づけはシンプルで、CAMの内側、つまり加工パスを作る工程そのものをAIが支援する。
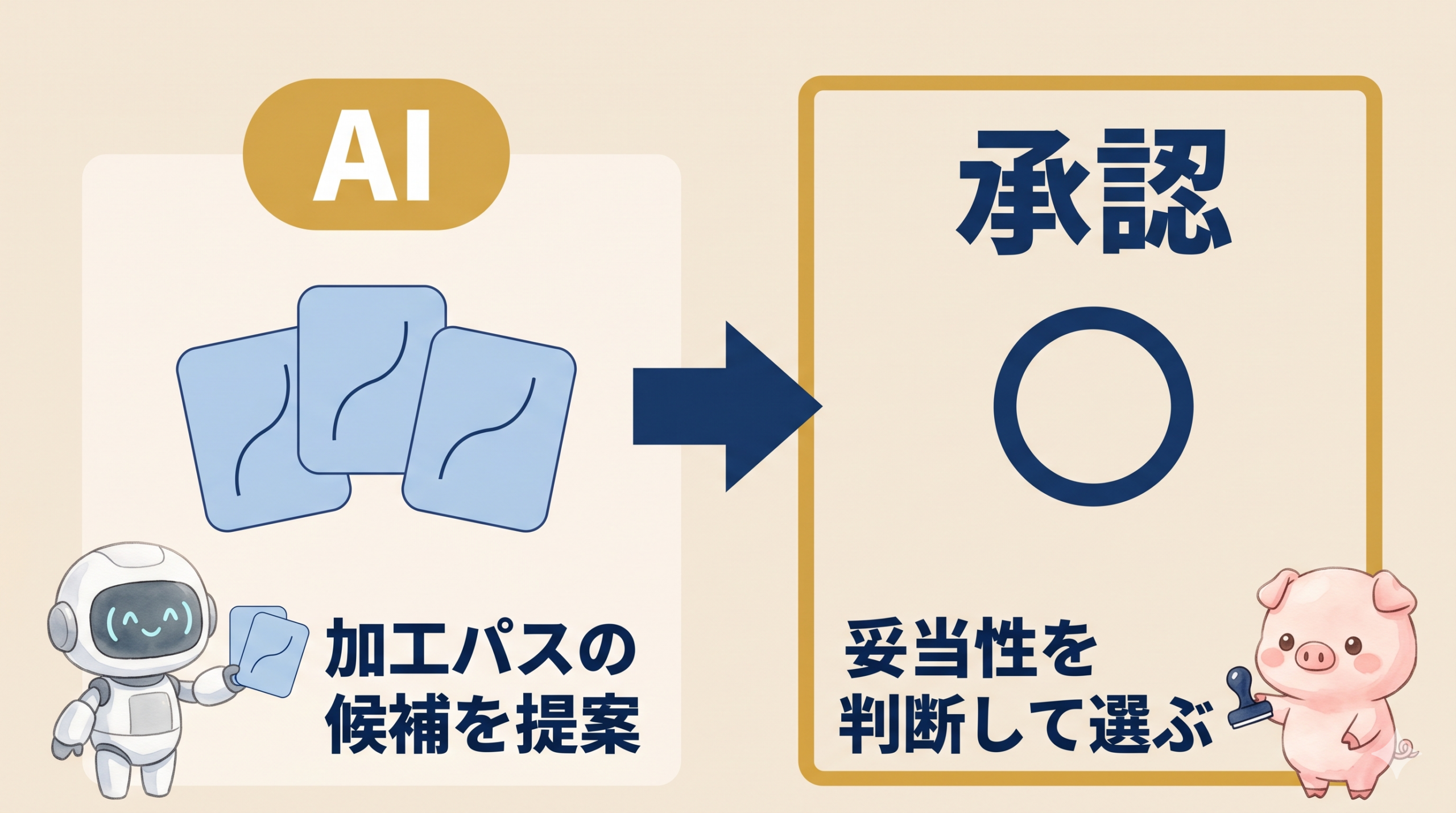
これまでパス設計は、ベテランのCAMオペレータが工具・材料・形状を見ながら手で詰めていく領域だった。Copilotは、その判断の一部を自然言語のやり取りや提案で肩代わりしようとする。例えば「この面の仕上げに適した工具経路の候補を出して」といった依頼に対して、たたき台を返してくる発想だ。
向いているのは、すでにCAD/CAMを日常的に触っている人だ。CAMの操作体系や、工具・送り・切込みといった用語が体に入っている前提があって初めて、AIの提案が妥当かどうかを判断できる。逆に言えば、CAMをまだ触ったことがない若手がここから入ると、AIの出力が良いのか危ないのか分からないまま使うことになり、これは一番避けたい状態だ。
| 項目 | Before(従来) | After(Copilot活用・想定) |
|—|—|—|
| パスのたたき台作成 | オペレータが一から構築 | AIが候補を提示、人が選定 |
| 最適化の試行回数 | 手作業で限られる | 候補を複数比較しやすい |
| 必要スキル | CAM熟練が前提 | CAM素地+AIの妥当性判断 |
注意したいのは、Copilotが出すのはあくまで「提案」であって「正解」ではない点だ。最終的に金属を削るパスを承認するのは人間で、ここは絶対に動かせない一線になる。5軸加工のように工具と被削材の干渉が複雑になる領域では、なおさら人の確認が重い意味を持つ。
5軸マシニングセンタとCAMの組み合わせをもっと具体的に比べたい人は、[5軸MC+CAMのAI比較(中小製造業向け・2026)](/5-axis-mc-cam-ai-comparison-smb-2026/)で機種とソフトの相性まで踏み込んでいるので、機種選定の段階にいるならそちらが地図になる。
3. Fusion 360 のAI/クラウドCAM ― 個人で全部触れる入口
「CAMの本命は分かったが、いきなり高価な環境は用意できない」。そういう若手にとって現実的な入口が、AutodeskのFusion 360だ。CAD・CAM・CAEがひとつにまとまっていて、個人や小規模から少額のサブスクで始められるのが最大の利点になる。
Fusion 360のCAMはクラウドの演算資源を使え、パス生成やトルパス(切削負荷を一定に保つ加工経路)の自動化など、AI/クラウド寄りの機能が組み込まれている。学習コストが比較的低く、日本語のUIや解説も豊富なので、独学で全工程を一人で触り切れる。
若手にとっての本当の価値は、CADからCAM、シミュレーションまでを一気通貫で自分の手で回せることにある。Mastercamのように分業された大規模環境では、若手が触れるのは一部の工程に限られがちだ。Fusion 360なら、設計から加工経路、干渉チェックまでを一人で往復できる。この「全工程を俯瞰した経験」は、後で大規模なCAM環境に移ったときにも効いてくる。
| 観点 | Fusion 360 | Mastercam Copilot |
|—|—|—|
| 始めやすさ | 高(個人サブスク) | 低(既存CAM資産前提) |
| 一人で触れる範囲 | 設計〜加工〜検証まで | CAM工程が中心 |
| 想定コスト | 月額サブスク | 保守契約上乗せ |
| 向く人 | これから学ぶ若手・小規模 | CAM熟練者 |
注意点は2つある。ひとつは、クラウド演算ゆえにネットワークやサービス側の都合に左右される場面があること。もうひとつは、手軽さに慣れると検証を飛ばしがちになることだ。個人で気軽に回せるからこそ、出力したG-codeを実機にかける前のシミュレーションと現物確認は、自分で意識して習慣化する必要がある。
トルパスとは、工具にかかる切削負荷(食い込む量)が一定になるように工具経路を制御する考え方のこと。負荷が急に上がる箇所を避けるように経路を作るので、工具が長持ちし、加工も安定しやすい。Fusion 360をはじめ多くの近代CAMに搭載されている。若手がこの言葉を覚えておくと、AIが出してきたパスを「なぜこの経路なのか」と読み解く手がかりになる。AIの提案を鵜呑みにせず、その背後にある加工の理屈を一緒に押さえていくと、ツールに使われる側ではなく使う側に回れる。
4. 汎用LLM+自前G-codeスクリプト ― 手を動かす若手の最適解
ここが、この記事で若手に一番すすめたい選択肢だ。ChatGPTやClaudeといった汎用LLM(大規模言語モデル)を使って、G-codeの後処理やマクロ、ちょっとした計算スクリプトを自分で書く。初期コストはほぼゼロ、月額も無料〜数千円で収まる。
具体的には、こんな使い方ができる。ポスト処理(CAMの出力を自社の機械が読める形式に整える工程)の変換スクリプトを書かせる。繰り返しの穴あけを生成するマクロのたたき台を出させる。複雑な座標計算をPythonで組ませる。どれも「手元の仕事をAIに手伝わせて、最後は自分で検証する」という、最も健全な形に収まる。
LLMにポスト処理スクリプトの骨組みを頼むときは、例えばこう指示する。
“`
CAMが出力した汎用G-codeを、当社の機械向けに変換するPythonスクリプトの
たたき台を書いてください。
- 入力: 標準的なG-codeテキスト
- 変換ルール: M3/M4の主軸指令を当社書式に置換、コメント行は保持
- 出力: 変換後のG-codeをファイルに書き出す
推測でルールを足さず、指定した変換だけを実装してください。
“`
ここで絶対に外せないのが検証だ。LLMはもっともらしい嘘(ハルシネーション)を出すことがある。G-codeの世界でこれをそのまま実機に流せば、工具の破損や被削材の不良、最悪は機械の衝突につながる。だから流れは必ず「AIが下書き → 人がコードを読む → シミュレータで空運転 → 端材で試し削り → 本番」になる。この検証の階段を一段も飛ばさないことが、汎用LLM活用の生命線だ。
それでもこの選択肢を若手に推すのは、コストがほぼかからず、しかも一番スキルが身につくからだ。CAMのボタンを押すだけでは、その内側で何が起きているかは見えにくい。だが自分でポスト処理を書けば、G-codeの構造そのものを理解せざるを得ない。AIに書かせて、読んで、直して、検証する。この往復が、工作機械エンジニアとしての土台を一番速く作ってくれる。
ハルシネーションとは、AIが事実に反する内容を、もっともらしい体裁で生成してしまう現象のこと。G-codeやサーボのパラメータのように「1文字の誤りが事故に直結する」領域では、これが最も警戒すべき性質になる。LLMは文章を自然につなげるのが得意な反面、その内容が現実に正しいかは保証しない。だからこそ、AIの出力を人が読んで検証する工程は省略できない。これから生成AIを業務で使う若手は、便利さと同じ重さで、この検証の癖を最初に身につけてほしい。
手元のスクリプトづくりに慣れてきたら、次は「AIに一連の手順をまとめて任せる」AIエージェントの組み方へ一段上げると、削れる手間が大きく変わる。独学だと回り道になりやすい領域なので、手を動かしながら体系的に学べる場を併走させると立ち上がりが速い。
現場の「面倒」を、自分の手で道具にする
学ぶ順序が見えたら、次は手を動かす番。環境構築不要でAIエージェント開発を実践できる「AI Agent Camp」なら、非エンジニアの若手でもオンライン完結で、現場の1業務を自動化する道具を作りながら学べる。
無料説明会あり / オンライン完結
▶ 環境構築不要!AIエージェント開発を非エンジニアでも即実践【AI Agent Camp】
![]()
※まずは身近な定型作業を1つ、AIエージェント化する課題から始めるのが定石
5. サーボ調整のAI/ベイズ最適化 ― 「ベテランの勘」をデータで詰める
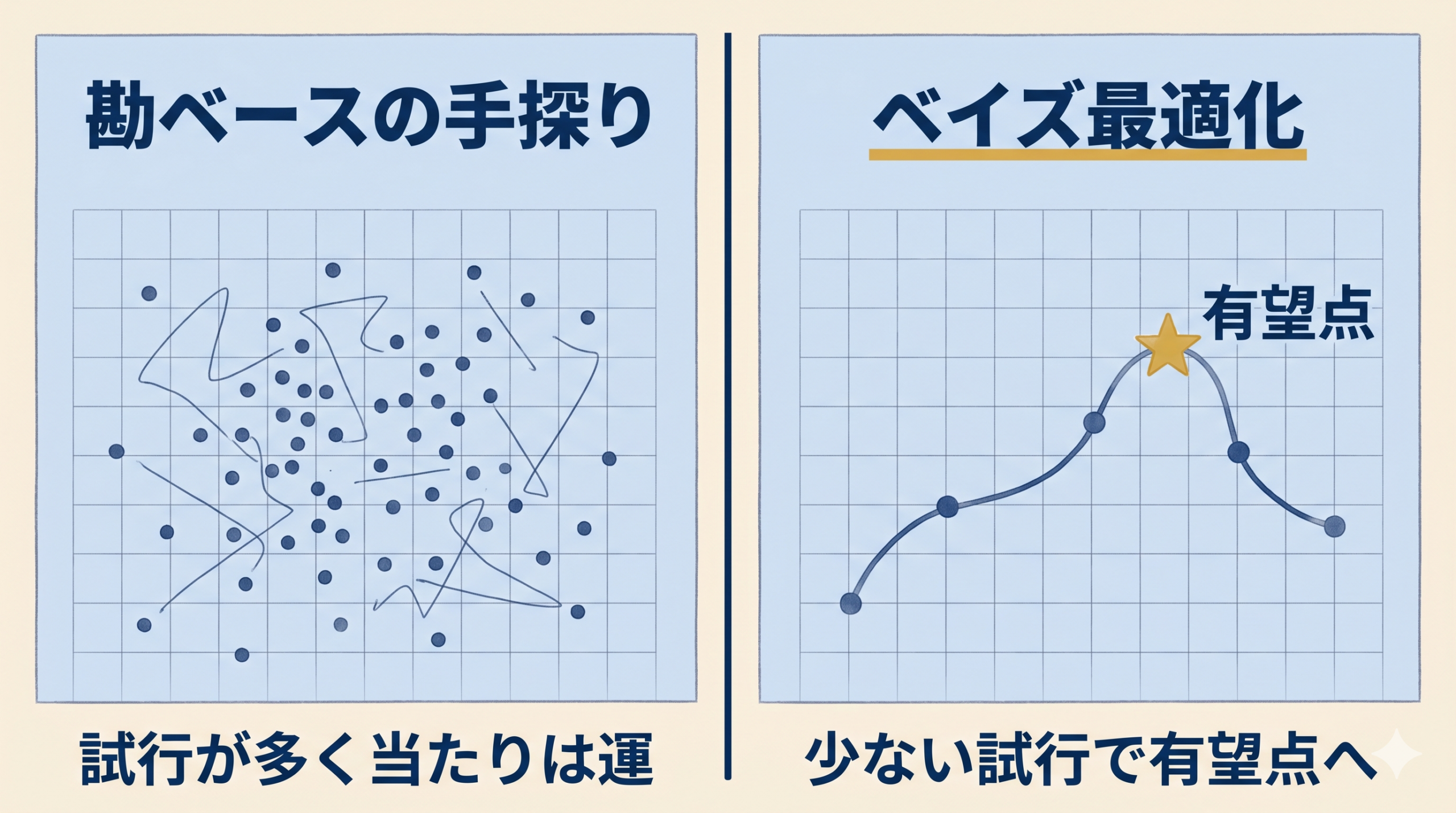
工作機械の動きの質を決めるのが、サーボの調整だ。位置決めの速さと正確さ、振動の少なさは、サーボのゲイン(指令への追従の強さを決めるパラメータ)をどう設定するかで変わる。これは長らくベテランの勘と経験に支えられてきた領域だった。
ここにデータの力を持ち込むのが、ベイズ最適化だ。ベイズ最適化とは、少ない試行回数で「良さそうなパラメータ」を効率よく探す最適化の手法のこと。やみくもに全パターンを試すのではなく、これまでの結果から「次にどこを試すと良くなりそうか」を統計的に推定しながら絞り込む。
| 項目 | Before(勘ベース) | After(ベイズ最適化・想定) |
|—|—|—|
| 調整の根拠 | ベテランの経験 | 測定データに基づく探索 |
| 試行の効率 | 当たりをつけて手探り | 少ない試行で有望点へ |
| 再現性 | 人に依存 | 手順とデータが残る |
| 必要スキル | 現場経験 | Python+最適化の基礎 |
実装はPythonと最適化ライブラリで組める。三菱電機をはじめ、サーボ調整にデータ最適化を持ち込む取り組みは事例として出てきており、必要なのは高価な専用装置ではなく、測定データを取れる環境とコードを書く力だ。ここはまさにプログラミングができる若手が、ベテランの勘という暗黙知に対して新しい武器で切り込める領域になる。
注意点は2つ。ひとつは、最適化が探るのは実機のパラメータなので、探索範囲を誤れば機械が振動したり過大なトルクを出したりすること。範囲の設定と安全確認は人が握る。もうひとつは、データの質だ。測定がノイズだらけなら、いくら賢い最適化でも誤った方向へ収束する。「ゴミを入れればゴミが出る」原則はここでも変わらない。
サーボ調整のベイズ最適化を、実際のコードと数式まで踏み込んで知りたい人は、[三菱サーボ調整をベイズ最適化×Pythonで詰める解説](/mitsubishi-servo-tuning-bayesian-optimization-python/)に手順をまとめている。Pythonが書けるなら、この記事を片手に自分の環境で再現してみるのが一番の近道だ。
6. CAD/PLM×Claude の小規模PoC ― 図面・部品表を自前で引く
5つ目は少し毛色が違う。加工そのものではなく、その手前にある図面や部品表(BOM)、過去の仕様書を「探す・要約する」仕事にAIを当てる選択肢だ。PLM(Product Lifecycle Management、製品の設計から製造・改廃までの情報を管理する仕組み)の周辺で、若手が小さく試せる。
現場の悩みとして、「あの部品の過去図面はどこか」「この仕様書のどこに公差が書いてあるか」を探すのに時間が溶ける、というものがある。ここにClaudeのようなLLMを、社内資料の範囲だけで答えるRAG(検索拡張生成。AIが回答前に指定資料を検索し、その中身を根拠に答える仕組み)として組むと、図面台帳や仕様書を読み込ませて自然言語で引けるようになる。
これは大規模なPLM刷新の話ではない。一人の若手が、自部署の資料だけを対象に小さく作る「PoC(概念実証、本格導入前の試作)」として始める想定だ。サブクラスター的には設計・PLM寄りのテーマだが、工作機械の現場でも「加工前の情報探し」は確実に時間を食う部分なので、視野として触れておく価値がある。
ここで海外メーカーの設備や、輸入工作機械の英文仕様書・取扱説明書を扱う場面が出てくる。海外CAMのドキュメントも英語が一次情報のことが多い。仕様書の翻訳を正確に回す手段を持っておくと、PLM検索の対象に海外資料も載せられるようになり、引ける情報の幅が一段広がる。
【翻訳】ファイル丸ごと翻訳・要約・校正なら
マニュアル/仕様書/技術文書を ファイルそのままアップロードで翻訳・校正・要約できる先端AIツール。製造業の英文マニュアルやFA機器の取説にも強い。Freeプランから即試用可。
※Free / BASIC / Pro / Pro Max / Enterprise の5プラン展開・翻訳精度はGPT-4ベース
注意点は、扱う情報の機密性だ。図面・公差・取引先名は外に出してはいけない機密が紛れ込みやすい。無料の汎用チャットに図面内容を貼れば、守秘義務に触れたり、入力が学習に使われる設定なら外部に残ったりする恐れがある。だからPoCの段階から、入力してよい情報の線引き(社外秘は入れない、入れるなら学習に使われない法人向けプランや社内に閉じた環境を使う)を先に決めておく。
PLMとは Product Lifecycle Management の略で、製品が生まれてから廃番になるまでの設計図・部品表・変更履歴といった情報を一元管理する考え方とシステムのこと。BOM(部品表)はその中核で、製品が何の部品でできているかの一覧だ。工作機械の現場では直接触れない若手も多いが、加工する部品の素性をたどると必ずこの情報にぶつかる。生成AIをこの領域に当てると「情報を探す時間」を削れるので、設計と製造をつなぐ視点を早めに持っておくと、キャリアの幅が広がる。
7. あなたの状況別 ― どれから試すかの判断フロー
5つ並べたが、全部を一度にやる必要はない。今の自分の状況に合う1つを選び、まず手を動かすのが正解だ。下の判断フローで自分の入口を決めてほしい。
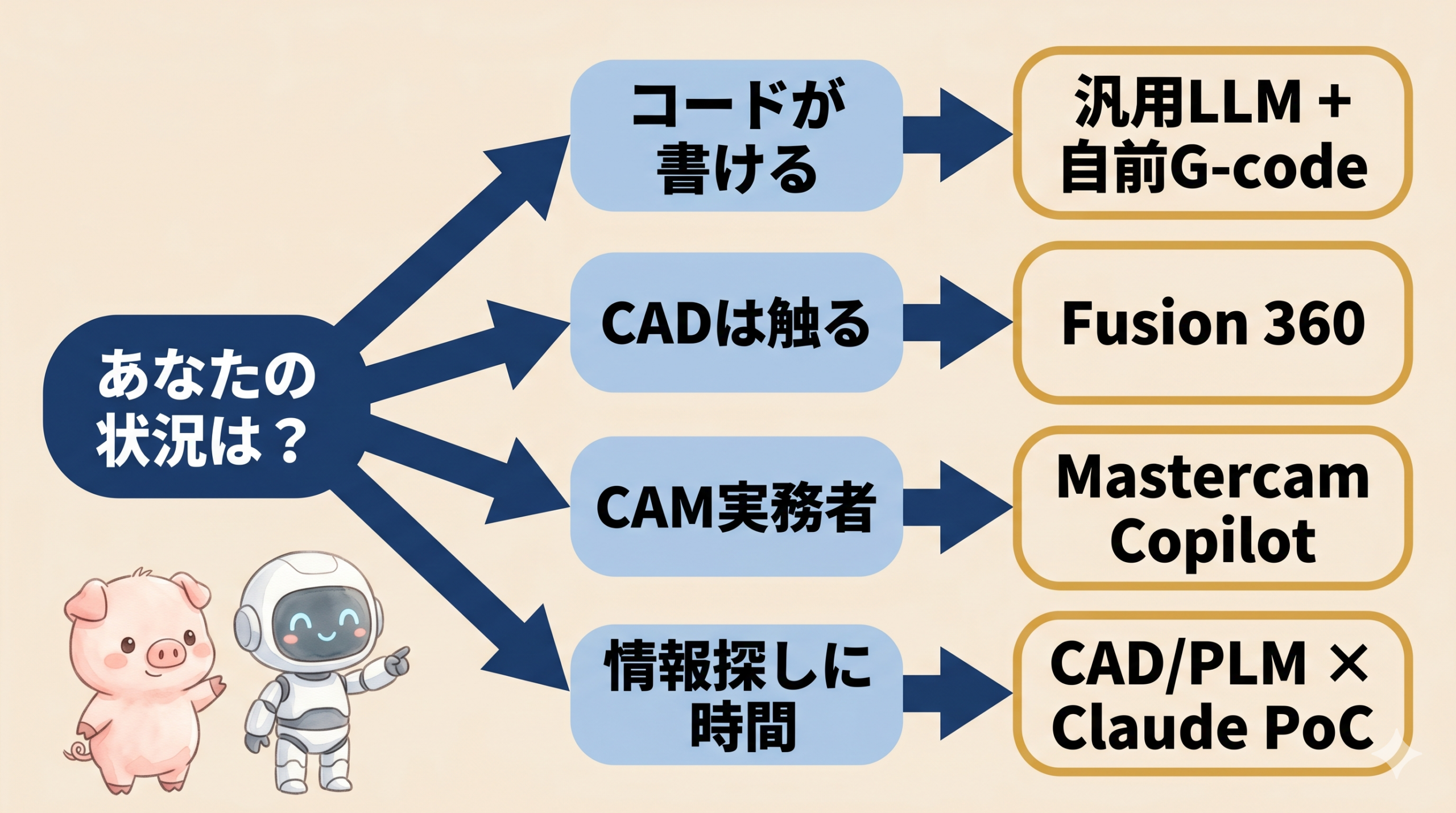
- プログラミングが書ける/コードが好き → まず「汎用LLM+自前G-codeスクリプト」(H2-4)。コストゼロで一番スキルが付く。Pythonが得意なら「サーボのベイズ最適化」(H2-5)へ。
- CADは触るがCAMはこれから/個人で全工程を学びたい → 「Fusion 360」(H2-3)。一人で設計から加工まで回せる。
- すでにCAMを日常的に使う実務者 → 「Mastercam Copilot」(H2-2)。提案を妥当性判断できる素地が活きる。
- 情報探しに時間が溶けている/設計・PLM寄りの仕事 → 「CAD/PLM×Claudeの小規模PoC」(H2-6)。自部署の資料から小さく。
どの入口を選んでも、共通する原則は変わらない。AIの出力は下書きであって正解ではない。最後の検証は人が握る。寸法・材料・G-code・サーボのパラメータは、ひとつの誤りが事故や不良に直結する。検査や制御と違って失敗が現場を止める世界だからこそ、人の確認を残した形から始める。
もうひとつ。最初から完璧を目指さないことだ。最初に書くスクリプトもプロンプトも、不完全で当たり前だ。出力を見て1行ずつ直していく。この「育てる」感覚こそが、工作機械×AIを使いこなすための核心になる。座学で分かった気になるより、不完全でも1本通してみる方が、習得は確実に速い。
まとめ ― 「自分で触れる選択肢」から始めれば遠回りしない
工作機械×AIの選択肢を、初期コスト・ランニング・自動化範囲・自分で手を動かせる度・日本語対応の5軸で並べてきた。整理するとこうだ。
- コストゼロで一番スキルが付く: 汎用LLM+自前G-codeスクリプト(手を動かす若手の本命)
- 個人で全工程を学べる: Fusion 360(CADからCAMまで一人で)
- CAM実務者の上積み: Mastercam Copilot(提案を判断できる素地が前提)
- Pythonで暗黙知に切り込む: サーボのベイズ最適化
- 情報探しを削る: CAD/PLM×Claudeの小規模PoC
そして、どれを選んでも外せない原則が2つ。AIの出力は人が検証すること。寸法・材料・G-codeの誤りは事故に直結するからだ。そして最初から完璧を目指さず、1本通して育てること。
工作機械の現場は、これまでベテランの勘と経験が支えてきた領域が多い。そこに、コードと最適化という新しい武器を持った若手が入っていける余地が、AIによって確かに広がっている。高価なツールに身構える前に、今日、手元のG-codeを汎用LLMに1回かけてみる。そこからしか始まらない。
手を動かしながらAIエージェントの組み方や、自社の手順をAIに覚えさせる方法を体系的に学びたい若手には、実装中心の講座で訓練量を確保するのが近道だ。
現場の「面倒」を、自分の手で道具にする
学ぶ順序が見えたら、次は手を動かす番。環境構築不要でAIエージェント開発を実践できる「AI Agent Camp」なら、非エンジニアの若手でもオンライン完結で、現場の1業務を自動化する道具を作りながら学べる。
無料説明会あり / オンライン完結
▶ 環境構築不要!AIエージェント開発を非エンジニアでも即実践【AI Agent Camp】
![]()
※まずは身近な定型作業を1つ、AIエージェント化する課題から始めるのが定石
FAQ
Q. CAMもプログラミングも未経験ですが、どれから始めればいいですか?
まずFusion 360で、CADから加工経路までを一人で一通り触ってみるのがおすすめです。個人サブスクで始められ、日本語の解説も豊富です。手応えがつかめたら、汎用LLMでG-codeの後処理スクリプトに挑戦すると、内側の理解が一気に深まります。
Q. ChatGPTやClaudeが出したG-codeを、そのまま機械にかけても大丈夫ですか?
絶対に避けてください。LLMはもっともらしい誤り(ハルシネーション)を出すことがあり、G-codeの誤りは工具破損や衝突に直結します。必ず「人がコードを読む → シミュレータで空運転 → 端材で試し削り → 本番」の順に検証してください。
Q. サーボのベイズ最適化は、文系出身でも実装できますか?
Pythonの基礎と最適化ライブラリの使い方を学べば実装自体は可能です。ただし探索範囲の設定や安全確認は機械の知識が要るため、最初は経験者と一緒に範囲を決めるのが安全です。コードの流れは[三菱サーボ調整の解説記事](/mitsubishi-servo-tuning-bayesian-optimization-python/)を参照してください。
Q. 海外メーカーのCAMや英文仕様書をどう扱えばいいですか?
海外CAMや輸入機のドキュメントは英語が一次情報のことが多いです。仕様書を正確に翻訳できる手段を用意しておくと、PLM検索の対象に海外資料も載せられ、引ける情報の幅が広がります。


コメント