
木曜は産業ロボット主軸日。今日は 安川電機の新型協働ロボ MOTOMAN-HC35 (可搬35kg) を頭に置き、Mujin の協働AGV 第2弾、オークマと FANUC の工作機械×AI、Hyundai×Boston Dynamics の Atlas 量産加速、そして経産省の「フィジカルAI」官民1兆円支援までを6本で並べる。
「重可搬の協働ロボ」「ISO 3691-4 準拠AGV」「工作機械×ロボの完全自動化」「人型量産の3陣営確定」「国家戦略としてのフィジカルAI」── 別々のニュースに見えるが、上から下まで 同じ1本の流れ の話だ。読み終わるころには、その流れが中小工場の通路幅・人員配置・補助金活用にまで降りてくる感覚が掴めるはず。
読了目安 14分。気になる文章だけ拾い読みでも構わない。
- 1. 安川電機が協働ロボ「MOTOMAN-HC35」を発売 ─ 可搬35kg・リーチ2030mm、物流とネジ締めに照準 (MONOist 2026-05-25)
- 2. Mujin が協働搬送AGV 第2弾を発売 ─ 300kg / 1,500kg、ISO 3691-4準拠で歩車混在に対応 (Mujin 2026-03-25 / 5月稼働ラッシュ)
- 3. オークマが工作機械×フィジカルAIで完全自動化を加速 ─ 愛知エンジニアリングセンター開設 (日経 2026年連載)
- 4. FANUC 機械加工ロボ M-810/270-27B が鉄部品切削に対応 ─ 切削荷重3.4倍、ロボが工作機械の領域へ (Mono Que 2026-05-21)
- 5. Hyundai×Boston Dynamics が Atlas を年3万台体制で量産 ─ 人型量産の3陣営確定 (UPI 2026-05-25)
- 6. 経産省「フィジカルAI」官民1兆円支援 ─ ソフトバンク主導の新会社構想と並走 (SBBit / 日経 2026-02〜継続)
- まとめ ─ 日本の産業AI×ロボの3つの動き
- 関連深堀記事
1. 安川電機が協働ロボ「MOTOMAN-HC35」を発売 ─ 可搬35kg・リーチ2030mm、物流とネジ締めに照準 (MONOist 2026-05-25)
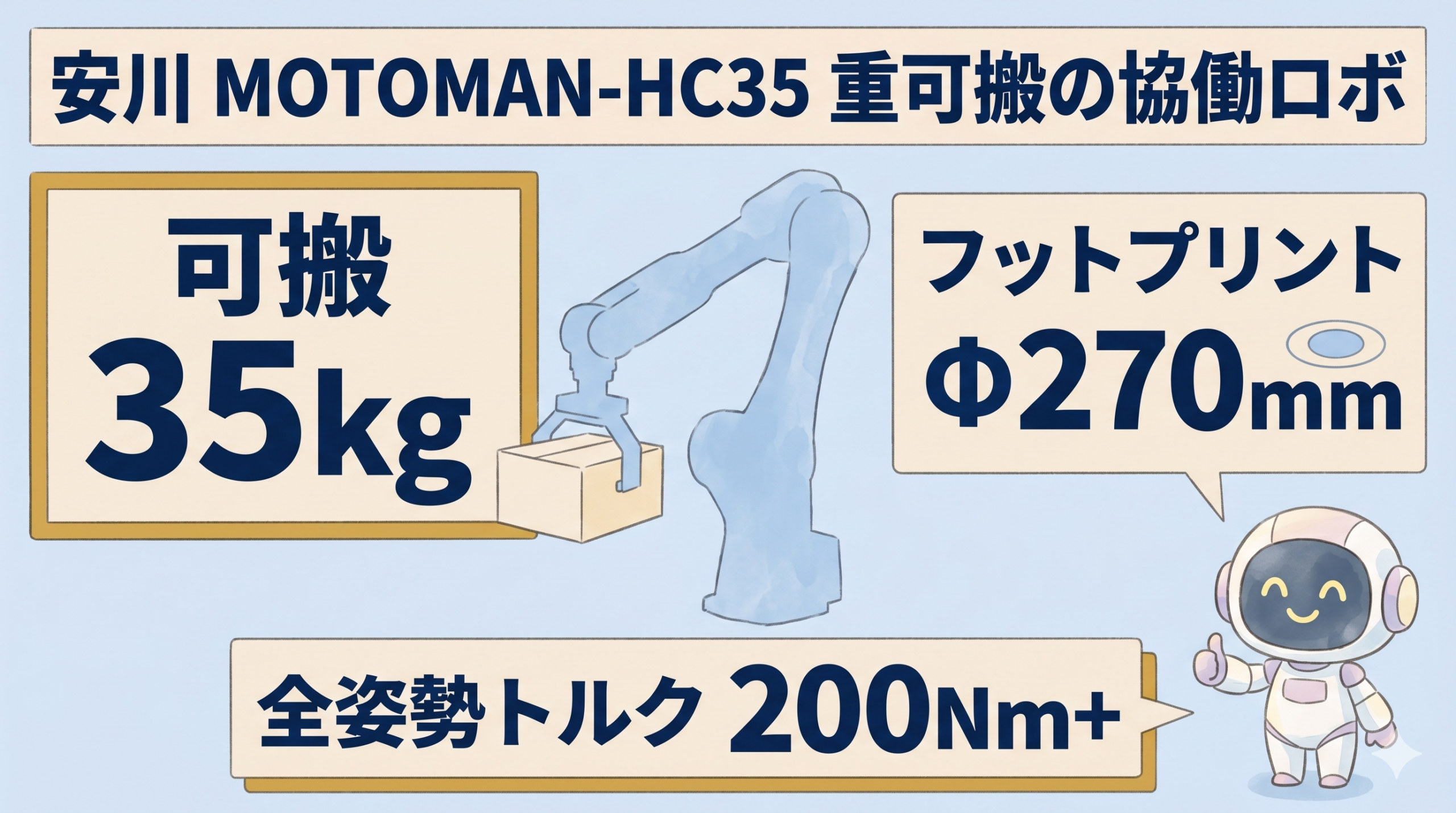
安川電機が協働ロボットの新モデル MOTOMAN-HC35 を 5月11日に発売した。可搬質量は従来 HC20DTP の 20kg から 35kg へ 75%向上、最大リーチは 2030mm、設置面のフットプリントは Φ380mm から Φ270mm へ小型化 している。新開発のトルクセンサで衝突時の応答速度を高め、安全停止と作業速度を両立させる設計。手首トルクは 200Nm 以上で、全姿勢でのネジ締め作業にも対応する。
協働ロボットの可搬重量は長く 20kg 台が現実的な天井だった。30kg を超える領域は安全柵で囲う産業ロボの仕事、というのが業界の暗黙の線引きだ。HC35 はその線を 75%押し上げてきた。狙いはパレタイズ・重量物搬送・大型ワークの組立で、対象顧客は 工場の通路幅に余裕がない中小〜中堅 が中心になる。
経営者目線では、今まで「フォークリフト+作業員2人」で回していた工程を、1台のロボに置き換える検討が現実的になったことが大きい。設置面 Φ270mm は 直径27cmの円 に収まるサイズで、既存ラインの1工程分のスペースをそのまま使える。
補足
協働ロボ (cobot) は「人と同じ空間で動かせる産業用ロボット」のこと。安全柵なしで動かせる代わりに、可搬重量と速度に上限がある。ISO 10218-2 (産業用ロボの統合安全規格) と ISO/TS 15066 (協働運転の指針) で、人と接触したときの押す力・押し当て時間が決まっている。HC35 がトルクセンサを刷新したのは、この「接触検知の速度」を上げて、速度を落とさず安全を担保するための設計判断。中小工場が最初に検討するなら、ネジ締め・部品供給・パレタイズの3工程から入るのが定石。
自社で試すなら、まず社内で 「20kg超を毎日10回以上動かしている工程」 を1枚紙に書き出すところから始めると話が早い。協働ロボの導入検討に関しては、ロボット導入と人員配置の構造を 協働ロボの RaaS と現場体制の動かし方 で別途整理している。
2. Mujin が協働搬送AGV 第2弾を発売 ─ 300kg / 1,500kg、ISO 3691-4準拠で歩車混在に対応 (Mujin 2026-03-25 / 5月稼働ラッシュ)
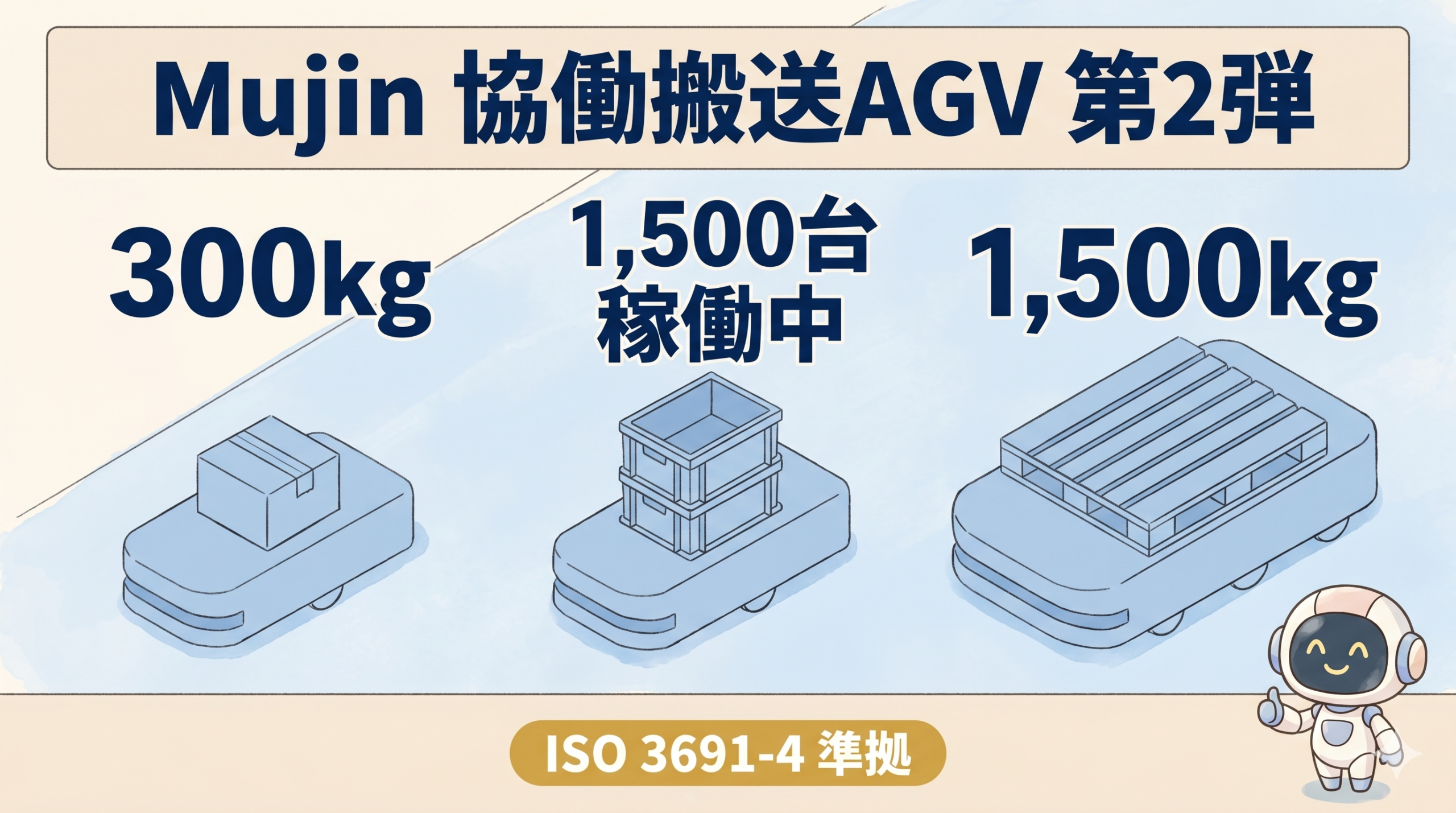
Mujin が「MujinAGV」ラインアップ拡充の第2弾として、可搬300kg と 可搬1,500kg のセーフティーモデル2機種 を 3月25日に発売した。両機種は ISO 3691-4 に準拠 し、作業員と同じエリアで安全に稼働できる。国内製造現場ですでに 1,500台超が稼働する MujinAGV の、最小帯と最重量帯を新たに埋めるかたちだ。
ポイントは「歩車分離が難しい中小工場」に効くスペックという点にある。大手の自動車工場のように人とAGV の動線をきれいに分けられない現場では、AGV が一時停止 → 人が通過 → 再起動という挙動を高い精度で繰り返す必要がある。ISO 3691-4 はその「人と混ざる前提」の安全規格で、認証取得モデルは保険適用・労基対応の両面で導入のハードルが下がる。
組立や検査より先に、搬送・荷下ろし工程の人手不足のほうが深刻、というのが中小製造業の実情でもある。重量パレットを倉庫から組立ラインまで運ぶ仕事は、人が辞めると一番先に詰まる。300kg〜1,500kg を埋めたことで「人がやっている搬送のうち、AGVが担えない領域」が一気に狭まった。
補足
ISO 3691-4 は無人搬送車 (AGV / AMR) の安全規格で、2020年に大改訂された。それ以前の AGV は「人がいないエリアで動かす」前提だったが、3691-4 はレーザースキャナ・3Dセンサ・人検知の冗長化を求めており、人と同じ床で動かしてよい設計になっている。AMR (Autonomous Mobile Robot) との違いは固定経路か自律経路かだが、最近は両者を統合した呼び方が増えている。中小工場の導入論点は「経路を作るより、運ぶ重量帯で機種を分けるほうが早い」。300kg は部品キット、1,500kg は完成パレットの目安。
導入を検討するなら、最初に 「搬送1回あたりの重量帯」「往復距離」「経路上の人通過頻度」 の3点を実測して、機種選定に渡す。経路設計や制御サーバーの置き場所は、機種を決めた後でいい。
3. オークマが工作機械×フィジカルAIで完全自動化を加速 ─ 愛知エンジニアリングセンター開設 (日経 2026年連載)
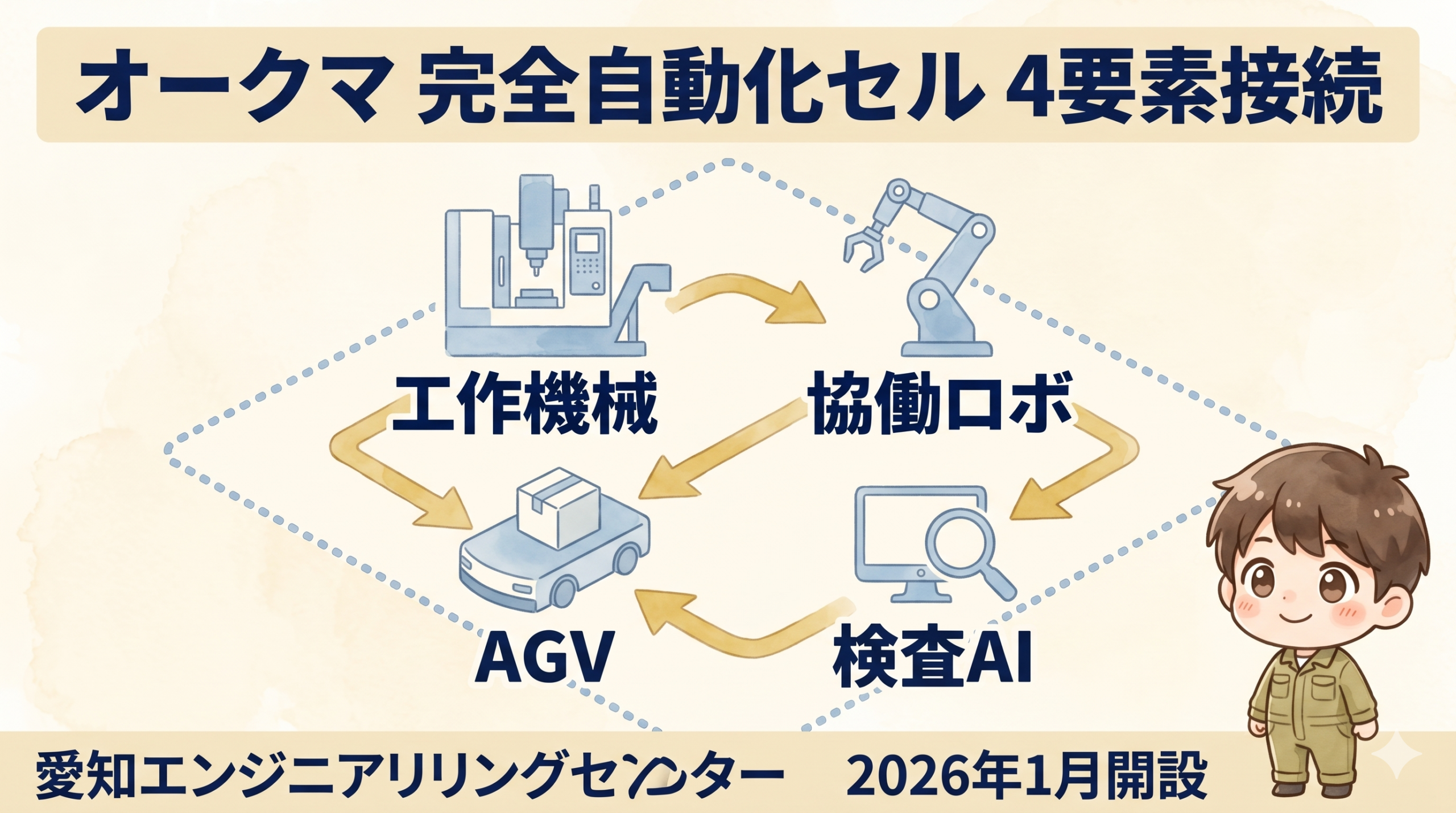
オークマが工作機械とロボットを連携させた 完全自動化システム の開発を加速している。2026年1月に愛知県江南市に「エンジニアリングセンター」を開設し、岐阜の物流拠点でも AI 搭載ロボによる省人化を進める。日経の中部展望連載で繰り返し報じられているように、同社は DMG森精機 (post 0807 で +43%既報) と並ぶ国内2位の工作機械大手として、「フィジカルAI元年」に正面から戦略を寄せた格好だ。
注目点は 「工作機械単体ではなく、AGV・協働ロボ・検査AI とセットで提案する」 という売り方の転換にある。これまで日本の工作機械メーカーは「機械の精度」を主戦場にしてきたが、ここから先は 完全自動化セル (機械 + ロボ + AGV + 検査) を1パッケージで提案する競争になる。Mastercam 2026 Copilot の CAM 側 AI 化 (post 0807) と組み合わさることで、CAD/CAM → 加工 → 検査 → 搬送までが連続的に動く絵が描けるようになってきた。
DMG森精機 が AI戦略で先行し、オークマが完全自動化セルで追い、ヤマザキマザック も独自路線で加わる。日本の工作機械3強がそれぞれ違う角度から AI×自動化に全力 という構図は、JIMTOF 2026 (10月26〜31日 東京ビッグサイト) で正面衝突する。
補足
「フィジカルAI」は経産省・ソフトバンクが押している呼称で、LLM のようなソフトウェアAI に対して、ロボット・センサ・工作機械といった「現実世界で動くAI」を指す。完全自動化セルは「工作機械 + ロボ + AGV + 検査AI」の4要素を一体運用する単位で、欧州ではすでに 2010年代後半から実用化が進んだが、日本は人手前提のラインが強かったため遅れていた。CAM 側で AI 加工パスを生成し、ロボが段取り替えし、AGV が完成品を運ぶ。若手の FA エンジニアが今後5年で関わるのは、まさにこの4要素の境界に立つ仕事になる。
工作機械×CAM の周辺については、Mastercam 2026 Copilot と5軸MC比較の現在地 で深堀している。AI×CAM が現場のオペレーション設計をどう変えるかは、こちらが参考になる。
4. FANUC 機械加工ロボ M-810/270-27B が鉄部品切削に対応 ─ 切削荷重3.4倍、ロボが工作機械の領域へ (Mono Que 2026-05-21)
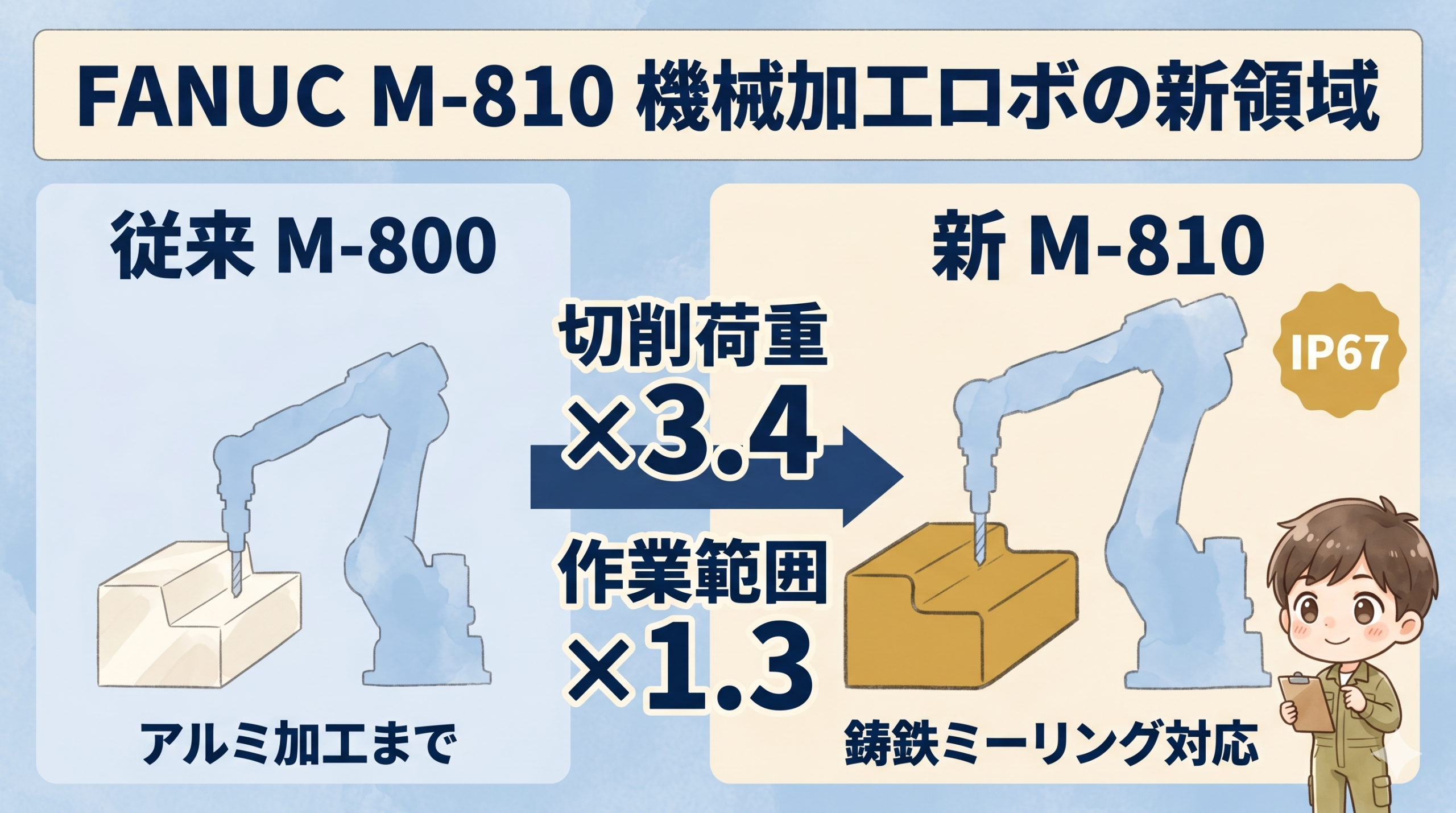
FANUC が 5月21日まで山梨本社で開催したプライベートショーで、機械加工ロボット M-810/270-27B を披露した。従来の M-800 比で 作業範囲1.3倍・切削荷重3.4倍 を達成し、これまでロボ切削の対象だったアルミ合金に加えて、鋳鉄のミーリング まで対応領域を広げた。高剛性アーム、独自キャリブレーション、切削反力下でも軌跡を維持する制御技術を組み合わせ、本体は IP67 の環境性能を備える。
技術的に強調すべきは「6軸多関節ロボで鋳鉄を削る」という線を超えてきた点だ。マシニングセンタ (MC) の剛性 = ロボの剛性、には依然として差があるが、剛性が低くても精度を出せる制御アルゴリズム で寄せてきた。切削反力でアームがたわむぶんを、リアルタイムにキャリブレーションで補正する設計。これにより「アルミは MC、鋳鉄もロボでいける」という選択肢が広がる。
工作機械業界の境界が溶ける、というのはここ数年言われ続けてきた話だが、M-810 で 実機ベースの数字 が出てきた。マシニングセンタを買い増すか、機械加工ロボで埋めるか、という選択肢を中堅工場が真剣に比較する段階に来ている。
補足
機械加工ロボ (machining robot) は産業用ロボに切削スピンドルを取り付けた構成。MC との違いは「移動範囲と剛性のトレードオフ」で、ロボは作業範囲が広い (アーム長 2〜3m が標準) かわりに、剛性が MC の 1/10〜1/30 程度しかない。これまで切削はアルミ・樹脂が現実的な上限だったが、鋳鉄まで対応する M-810 はその常識を更新する。IP67 は粉塵・切削液の侵入を許さない保護等級で、切削現場では必須スペック。CAM 側ではロボ用ポストプロセッサ (Mastercam / Robotmaster / RoboDK) の選定が新人 FA エンジニアの実務論点になる。
「マシニングセンタ vs 切削ロボ」の境界は、JIMTOF 2026 の隠れた主役テーマになる。気になる読者は、メーカー3社 (FANUC / KUKA / ABB) の切削ロボ最新カタログで作業範囲・切削荷重・対応CAM の3点を並べて比較すると、地形が見える。
5. Hyundai×Boston Dynamics が Atlas を年3万台体制で量産 ─ 人型量産の3陣営確定 (UPI 2026-05-25)
Hyundai Motor Group が Boston Dynamics の人型ロボ New Atlas を 2028年までに年3万台規模で量産する体制 を発表した。自社の Software Defined Factory (ソフトウェア定義型工場) 構想と組み合わせ、車体組立・部品供給・検査工程に Atlas を順次配備していく方針だ。Figure AI が 1時間あたり1台量産の計画を公表 (post 0739) し、1X が NEO の家庭向け量産を進めるなか、Hyundai×Boston Dynamics の参戦で「工場用人型量産の3陣営」が明確に揃った ことになる。
ポイントは Hyundai が 自社工場をいきなり主要顧客にできる という点だ。Figure AI が BMW と組み、1X が消費者向けに振ったのに対し、Hyundai は2021年に Boston Dynamics を買収済みで、現代 → Boston Dynamics の親子関係で量産権を握っている。「車体組立工程に Atlas を補助で投入し、量産データを取りながら他工程へ広げる」 という、社内検証 → 外販という逐次展開ルートが組める。
経営の見方としては、人型ロボがいきなり既存のラインオペレータを置き換える話ではない。重量物保持・繰り返し作業の補助 から入り、「人にしかできない工程」と「人型に任せられる工程」の境界を探る段階だ。3陣営の量産レースは、向こう3年で コスト・稼働時間・現場安全性 の数字勝負になる。
補足
New Atlas は2024年4月に Boston Dynamics が発表した完全電動の新型 Atlas で、それ以前の油圧式に比べて軽量化・量産性・整備性が大きく改善された。Software Defined Factory はソフトウェア定義型工場の意味で、AGV・ロボ・AI・MES (生産管理システム) が API でつながり、工程変更がソフト更新で完結する設計思想。これが Atlas のような汎用ヒューマノイドと噛み合う前提になる。Figure AI・1X・Hyundai×Boston Dynamics の3陣営は、それぞれ「BMW工場 / 家庭 / 現代工場」と量産検証先が異なり、向こう3年で勝ち筋が分岐していく。VLA (Vision-Language-Action) モデルや模倣学習との接続が、若手エンジニアの研究領域として一気に立ち上がる。
工場向け人型ロボの動きは、JIMTOF 2026 と並んで、World Robot Summit と CEATEC の見どころでもある。3陣営の量産機を実機で並べて触れる機会は、2026年後半から急速に増える見込みだ。
6. 経産省「フィジカルAI」官民1兆円支援 ─ ソフトバンク主導の新会社構想と並走 (SBBit / 日経 2026-02〜継続)
経済産業省が フィジカルAI 分野で官民あわせて 1兆円規模の支援策 を打ち出す方針を継続的に報じている。ソフトバンクが主導する新会社構想と並走し、ロボット・工作機械・AGV・人型を 「日本の次世代主力産業」 として束ねて育成する戦略だ。5月時点で支援の枠組みは具体化フェーズに入っており、補助金・税制優遇・人材育成の3本立てで設計が進んでいる。
ここまで紹介した1〜5の話 ── 安川 HC35、Mujin AGV、オークマ、FANUC M-810、Hyundai Atlas ── は、上から見ると すべて「フィジカルAI」というひと括り に入る。日本国内では工作機械×ロボの統合で勝負する角度、海外勢は人型と AGV の量産で勝負する角度。経産省が1兆円を投じる理由は、この5本のニュースがバラバラの動きではなく、ひとつの国家戦略テーマ であるという認識が政府側にできてきたからだ。
中小工場の経営者にとっての論点は2つ。1つは 省力化補助金 (第6回締切済・第7回進行中) との二段重ねで活用できるか。フィジカルAI 戦略はあくまで産業育成の上位レイヤーで、現場が直接申請する補助金とは別の建てつけになる。もう1つは 「国家プロジェクトに繋がる中小事例」 として、自社の自動化案件をどう位置付けるか。大手案件の下請けで部分的に関わることはあり得る。
ロボ × AI × 工作機械 を統合的に語る記事は、これから増える。中小製造業の視点で AI 主要モデル (Claude / Gemini / GPT) を比較する論点は、製造業のAIモデル比較ハブ に別途まとめてある。LLM 選定そのものを深堀したい読者はこちらへ。
補足
フィジカルAI = 物理世界で動くAI、と定義される。LLM のように画面の中で完結するソフトウェアAI に対して、ロボット・センサ・工作機械・自動車・建機など、フィジカルな世界に出力するAIを指す。経産省の1兆円規模は、研究開発助成・装置補助・人材育成 (FA技術者×AIスキル) の3層に分かれて配分される予定。米中の半導体製造装置の対中規制 (MATCH法・post 769) と並べて読むと、日本がどの土俵で勝負しに行くかが見える。若手の FA エンジニア・AI エンジニアにとっては、向こう5年で 「フィジカルAI 担当」 という新しい職種カテゴリが立ち上がる前夜にあたる。
国家戦略の動きと、現場の補助金活用 (省力化・取適法・AI関連) の両方を抑えると、自社の意思決定の解像度が一段上がる。
まとめ ─ 日本の産業AI×ロボの3つの動き
今日の6本を上から見ると、3つの動きに整理できる。
- 重可搬の協働ロボ・AGV が中小工場の現実解になり始めた (安川 HC35 / Mujin AGV)
- 工作機械×ロボの境界が溶け、完全自動化セルの提案合戦が始まった (オークマ / FANUC M-810)
- 人型量産レースが3陣営に絞られ、国家戦略として束ねる動きが出てきた (Hyundai Atlas / 経産省1兆円)
JIMTOF 2026 (10月) と、向こう3年の量産レースが、この6本のニュースの答え合わせの場になる。
関連深堀記事
- 製造業のAIモデル比較ハブ ─ Claude / Gemini / GPT の使い分け — 中小製造業視点のLLM比較
- Mastercam 2026 Copilot と5軸MC比較の現在地 — CAM 側 AI 化の最新動向
- MATCH法と半導体製造装置の対中規制 — フィジカルAI 国家戦略の対照軸

