
客先の作業条件を入れると、国産7メーカー40機種の協働ロボットから適合する最小機種をその場で判定します。下の画面でそのまま動かせます(スマホ可・登録不要)。
数値はメーカー公開カタログ値(出典つき)。リーチの稼働範囲は近似、タクトはTCP速度ベースの概算で、速度が非公表の機種は「非公表」と明示します。最終判断は各社の公式仕様で確認してください。
このアプリの使い方
客先の作業条件を入力するだけで、「足りる協働ロボットか」「サイクルタイム(タクト)はどれくらいか」をその場で判定します。操作は大きく3ステップです。
ステップ1 作業条件を入力する(左パネル)
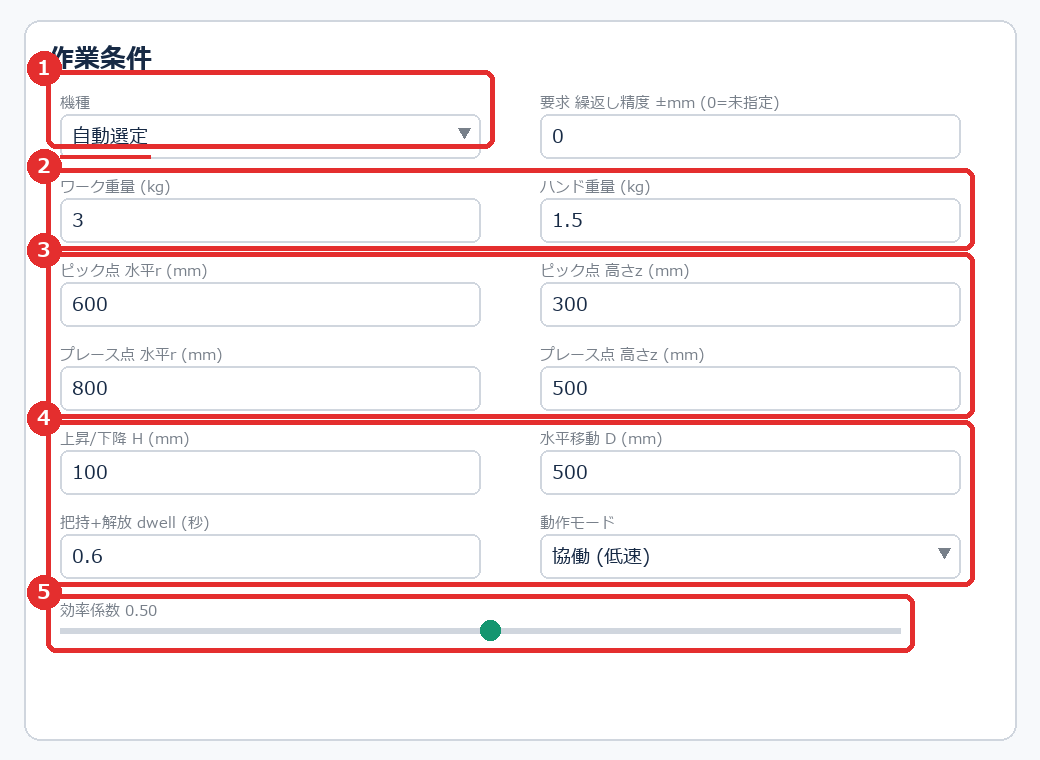
- ① 機種 ― まずは「自動選定」のままでOK。条件を満たす中から最適な一台を自動で選びます。特定の型式を試したいときだけ指定します。
- ② ワーク重量・ハンド重量(kg) ― 運ぶ物とハンドの重さ(例:3kg/1.5kg)。合計から「可搬質量が足りるか」を判定します。
- ③ ピック点・プレース点(水平r/高さz・mm) ― 取りに行く位置と置く位置を、ロボット中心からの水平距離と高さで入力(例:ピック600/300、プレース800/500)。「リーチが届くか」を判定します。
- ④ 上昇/下降H・水平移動D・把持dwell・動作モード ― 1サイクルの動きを表す条件です。動作モードは「協働(低速)」などを選べます。
- ⑤ 効率係数 ― 加減速や余裕を見込む係数(例:0.50)。これらからサイクルタイムを概算します。
※「要求 繰返し精度」は 0=未指定で構いません。精度が必要な工程のときだけ入力します。
ステップ2 判定を読む(右パネル)

- ① 機種名 ― 例:FANUC CRX-5iA(自動選定)。下の「メーカーの仕様ページ」から出典・画像を確認できます。
- ② 可搬 ― 例:◎ OK(必要4.5/定格5kg)。必要重量に対する余裕も表示します。
- ③ リーチ(ピック/プレース) ― それぞれ届くかを ◎/○ で表示します。
- ④ 繰返し精度 ― 要求と仕様(例 ±0.03mm)を併記します。
- ⑤ サイクル時間・時間あたり処理数 ― 例:3.40秒/1058個・時。生産量の当たりをつけられます。
- ⑥ 総合判定 ― 「◎ 適合」「△」「✕」で結論を示します。
ステップ3 根拠を確認する
- 数値はメーカー公開カタログ値で、出典リンク付きです。
- リーチの稼働範囲は近似、サイクルタイムはTCP速度ベースの概算、速度が非公表の機種は「非公表」と明示します。
- 最終判断は各社の公式仕様で確認してください。
使いこなしのコツ
- まずは「自動選定」で当たりをつけ、候補が出たら型式を指名して条件を変えながら比較します。
- 「適合」と出ても、最終は現場条件とメーカー仕様で確認します。本ツールは“最初の絞り込み”を速くするためのものです。


コメント