机の上で、架空の工場を一台ずつ建てている。これまで協働ロボットのアームと、物を掴むハンドを外形図から起こしてきた。今回はその土台だ。メーカーが公開する専用台車(架台)の外形寸法図から、SUSフレームのキャビネットを起こし、その上にロボットを正しい位置で載せるところまで通した。寸法は図面の数字だけを使い、製品名やロゴは出していない。

外形図から架台を起こす
台車は、SUSの角フレームで組んだ箱型のキャビネットだ。外形寸法図から、幅・奥行・高さ(およそ1160×900×810mm)、前面の扉、四隅のキャスター、上面のロボットプレート(ロボットをボルト留めする台)を拾い、Fusionで起こした。扉や昇降ハンドル、脚まで付けて、カタログの見た目に寄せている。

取り付け位置を「測って」合わせる
今回の肝は「どこに載せるか」だ。台車のロボットプレート上面は床から995mm、その中心にロボットの基部(200mm角)が来るように合わせた。3Dデータからプレート上面の高さと中心を実測し、ロボットをその位置へ持ち上げる。勘で置くのではなく測って合わせるから、基部がプレートからはみ出さず中央に収まる。
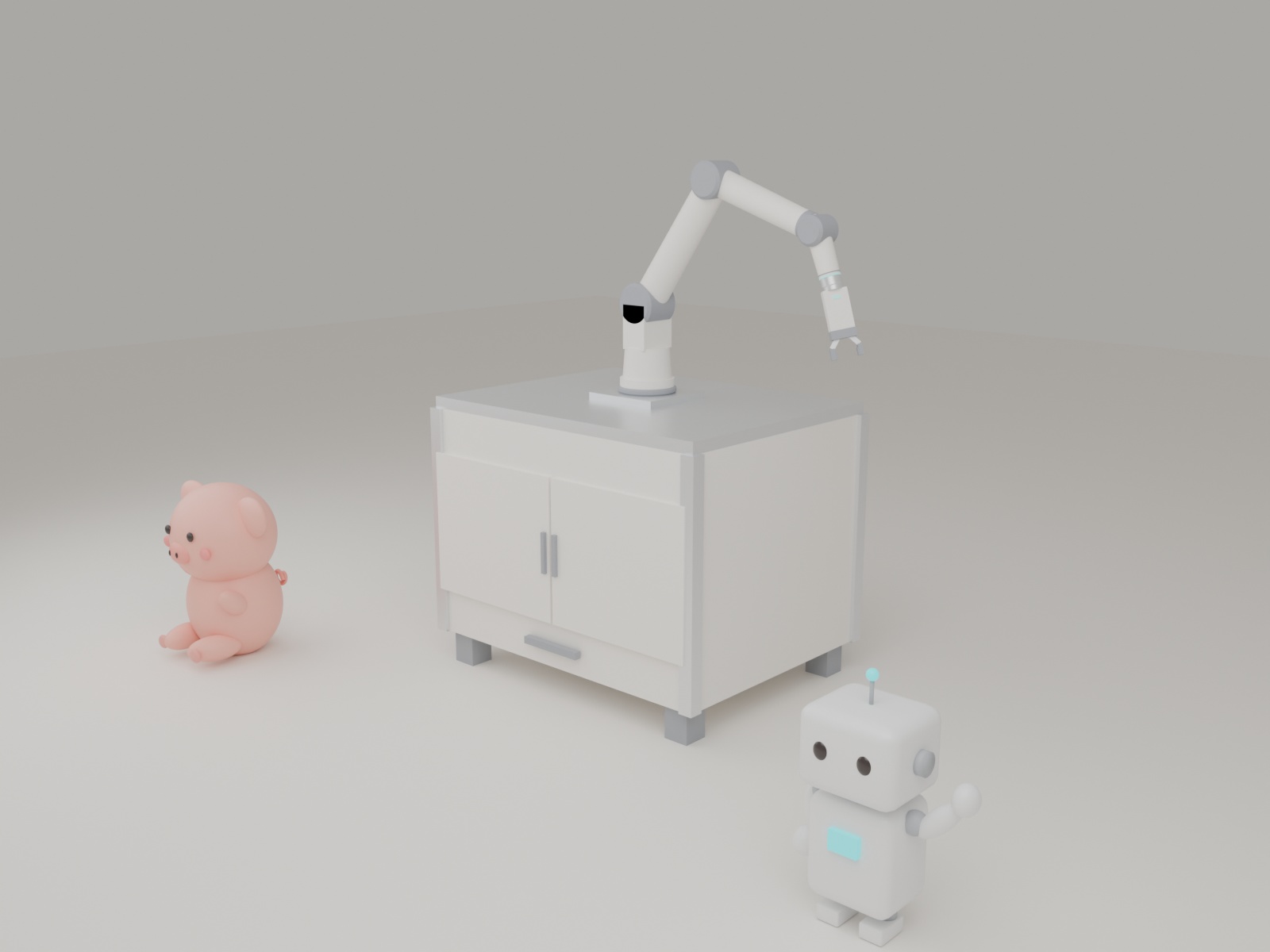
載せて、確認する
アームとハンドを付けた協働ロボットを台車に載せると、基部がプレート中央に着座し、アームが前方へ張り出す作業姿勢になった。台車の高さ(約1m)とロボットの届く距離(約1.1m)のバランスも、実機の組み合わせらしく収まっている。
補足:協働ロボットは、本体・ハンド・土台(架台)を別々に選んで組み合わせて使う。だから本体と台車を別々に起こし、取付面の高さと中心を測って合わせる今回の進め方は、実機の据え付けとそのまま重なる。
本体・手・土台がそろった
精度はCAD、説得力はビジュアル。外形図さえあれば、アームも、手も、土台も同じ手順で起こせて、寸法を合わせて組める。机の上で、協働ロボットが「立つ場所」を得た。次は、この一式を工場のラインに置いて動かしたい。

コメント