「この装置、カタログの紙面しか残っていない」。設備の更新や周辺設計の現場では、意外なほどよくある状況です。図面データもCADデータも手元にない。それでも、カタログに載っている公開寸法を根拠にすれば、寸法の通った2D外形図と実寸の3Dモデルまで一気に起こせます。今回は防塵・防滴タイプの4軸スカラロボットを題材に、その一連を通した製作実績を紹介します。
手元がカタログ1枚でも、図面は起こせる
出発点は製品カタログの紙面だけ。ここからメーカーが公開している寸法値(アーム長・ストローク・全高・取付ベース・作動範囲)を拾い、推測ゼロの数値だけでA3の外形図に落とし込みました。投影は第三角法、正面図1:5・平面図1:10・先端詳細2:1の3ビュー構成です。作動範囲(リーチ400mm・旋回角)や主要仕様の一覧表も図面内にまとめてあるので、設備レイアウトの検討にそのまま使えます。
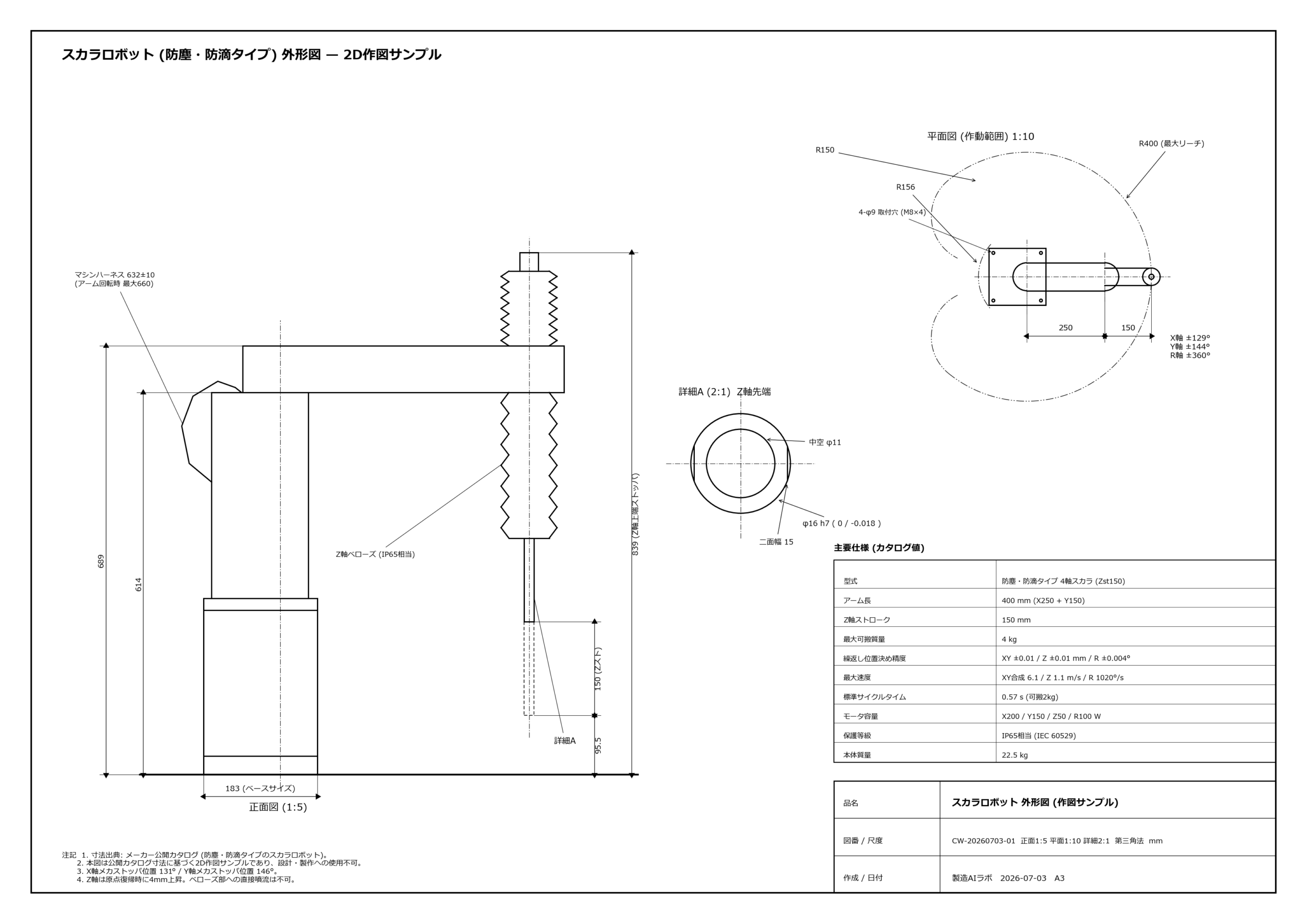
補足:外形図とは、装置の外側の寸法と取り合い(取付穴・可動範囲)だけを表した図面のことです。内部構造の図面がなくても、設置検討・干渉チェック・架台設計にはこの1枚で足ります。
図面から実寸3Dへ。4軸の構造まで再現
次に、この図面の数値をそのまま使って3Dモデルを起こしました。全高839mm・リーチ400mm・ベース183mm角という実寸どおりの包絡寸法の中に、スカラロボットの4軸構造――基部の旋回、エルボの旋回、先端の上下、先端の回転――を、関節の段違いスタックが見える形で組んでいます。外装は実機と同じく機構をカバーで覆ったクリーンな形状にし、基部からアームへ回り込むケーブルダクトまで再現しました。なお実在製品の意匠を扱うため、製品名・メーカー名・ロゴは出さない運用にしています。
架台に載せ、ハンドを付けて設置イメージまで
単体のモデルで終わらせず、以前外形図から製作した専用架台(プレート上面までの高さ995mm)に搭載しました。取付は両者の実寸から、ベースがプレートに収まることとアームの張り出しが架台の投影面内に収まることを数値で確認してから決めています。先端には平行2爪のグリッパも装着しました(視認性を優先して意図的に2倍スケールで表示)。ロボット・架台・ハンドを同じ縮尺で組んでいるので、設置スペースや動作範囲の検討にそのまま流用できる3Dシーンになっています。

この「実寸で組んで配置を確かめる」進め方の利点は単純です。図面上の数字を3D空間に持ち込むと、紙の上では見えなかった干渉や作業高さの問題が、着工前に見えてきます。
納品物と、対応できる依頼の形
今回の一式で生成した納品物は次のとおりです。
- 2D外形図: PNG / PDF / DXF (CADでそのまま開けます)
- 実寸3Dモデル: ロボット単体+架台搭載セル (部品別データ)
- レンダリング画像: 設置イメージ(実機調)とアイキャッチ用(トイ調)の2スタイル

この製作は、当ラボが実績を積み上げている対応サービスのうち「2D図面作成」「写真・外形図から実寸3Dモデルを起こす」「工場レイアウト・設備配置の可視化」の3つにまたがる内容です。カタログ・写真・手描きラフなど、手元にある材料が何であっても、寸法の根拠を1つずつ確認しながら図面と3Dに起こします。正式なご依頼の受付は準備中ですが、実績は本サイトで順次公開していきます。


コメント