30秒でわかる: 2026-05-15 ファナックが本当に発表したこと
2026年5月15日、ファナックはNVIDIAとの連携強化を公式発表した。
中身は一行で言える。ROBOGUIDE と NVIDIA Isaac Sim が双方向で繋がった。
公式の見出しは「物理エンジン統合による高精度デジタルツイン」だが、現場目線で本当に重要なのは別のレイヤーだ。Isaac Sim 内の仮想ロボを、ROBOGUIDE 接続の教示操作盤(実機 or 仮想)からそのまま操作できる。
つまり、ジョグ → 教示プログラム作成 → 動作確認 までが机上で完結する。
ロボットを止めずに、ラインを動かしたまま、PC の前で教示が終わる。
実は2日前の2026-05-13、ファナックはGoogle Geminiとの協業も発表していた。
本記事はその姉妹記事「【深堀】ファナックがGoogle Geminiを搭載した本当の意味」とセットで読むことで、ファナックが組もうとしている「二層スタック」が立体的に見えてくる。
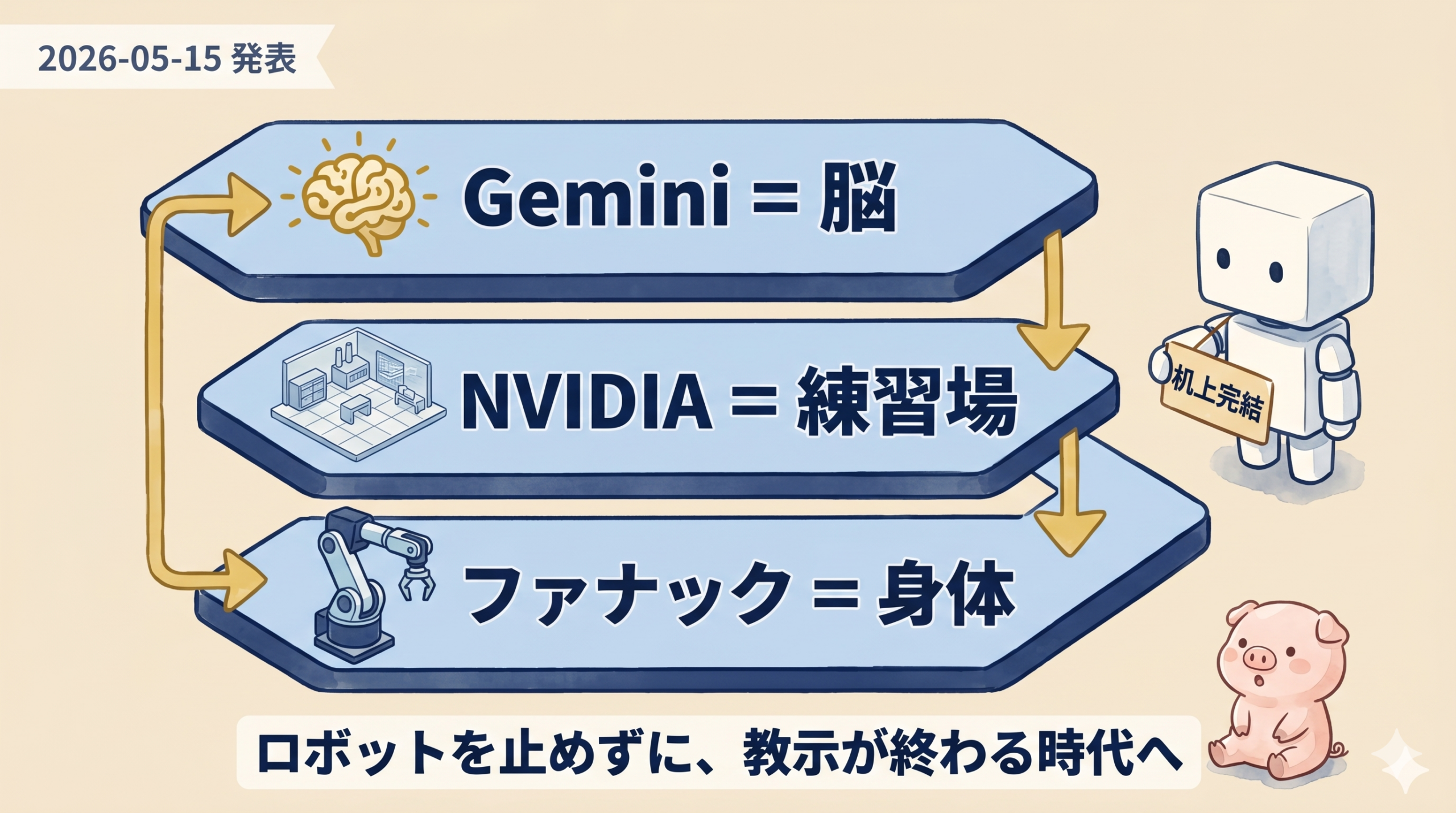
Gemini=脳 / NVIDIA=練習場 / ファナック=身体
この三者構造を理解せずに「Gemini か Omniverse か」と二択で議論している現場は、すでに半周遅れている。
本記事の観点3点(R015フィルタ)
| 観点 | 中心メッセージ | 競合10本との差 |
|---|---|---|
| ① 教示の机上完結 | ロボを止めずに机上で教示が終わる | 競合10本中、教示工数の机上完結を中心据えにした記事はゼロ |
| ② 二層スタック完成図 | Gemini=脳 / NVIDIA=練習場 / ファナック=身体 | 競合は2発表を別個に扱うのみ |
| ③ 1人デジタルツイン | RTX 5080(約30万)+ Isaac Sim 無料で着手 | 競合は数百万〜数千万のPoC前提 |
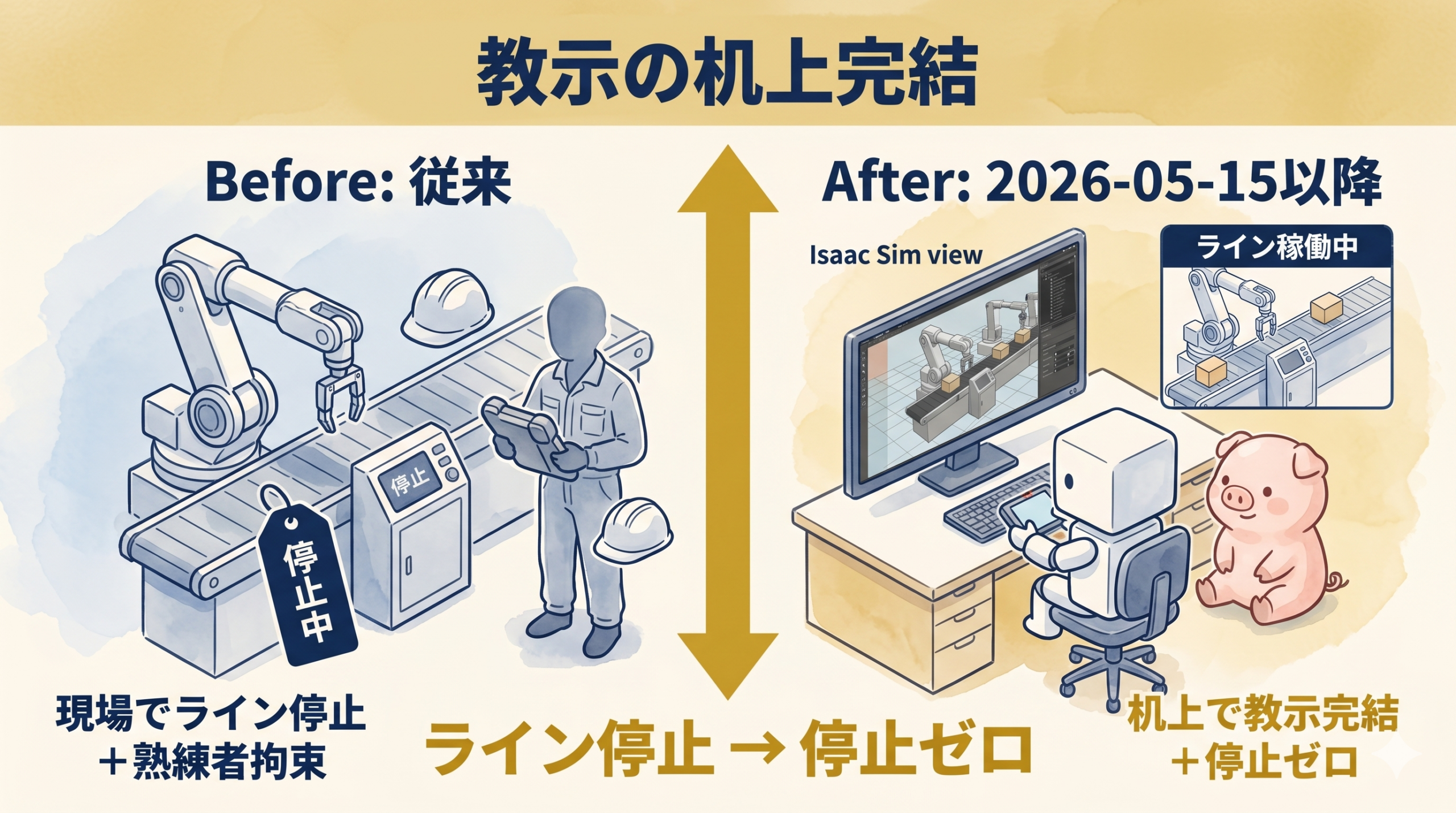
なぜ”教示の机上完結”が中小工場に効くのか ── 現場ペイン直撃
ロボットの教示工程は、中小製造業にとって「見えない出血」だ。
ライン停止、熟練者の拘束、ティーチペンダントを握り続ける半日。
このコストは、稟議に上がらない代わりに毎月確実に発生する。
従来の教示: ライン停止 × 熟練者拘束
新製品の段取り替え、ロボハンドの交換、ばら積み取り出しの微調整。
いずれも実機を止めて、現場で、教示者がペンダント操作で詰める。
| 工程 | 従来 | 想定値: 影響 |
|---|---|---|
| 段取り替え | 数時間〜数日 | 想定値: ライン停止損失が直撃 |
| 教示ピーク時短 | 熟練者が現場拘束 | 想定値: 人件費 + 機会損失 |
| 微調整リトライ | 実機で繰り返し | 想定値: 衝突リスク |
(※公式数値は非公表のため、上記はすべて「想定値:」プレフィックス付き)
Isaac Sim 完結後: 仮想空間で実機同等の教示が回る
今回の連携で何が変わるか。
Isaac Sim 内の仮想ロボを、実機と同じ教示操作盤で動かせるようになった。
- ジョグ操作 → 仮想ロボが反応
- 教示プログラム → ROBOGUIDE が解釈
- サイクルタイム / 軌跡 → 実機同等の精度で確認
ライン停止ゼロ。熟練者は自席で完結。
仕上がったプログラムは ROBOGUIDE 経由で実機に流し込む。
中小工場で効く理由はシンプルだ。
日本の中小企業の労働分配率は約8割(中小企業白書 2025)。
人件費の8割が固定費に乗っている構造下では、「熟練者をペンダントから解放する」効果は、設備費の議論より遥かに大きい。
世界に既設されたファナックロボットは約110万台(TheNextWeb 2026-05)。
この110万台のオーナーすべてが、原則として今回の連携の恩恵を受ける立場にある。
技術の中身: ROBOGUIDE × Isaac Sim の双方向統合
公式発表を分解すると、統合には2つのパターンがある。
パターンA: ROBOGUIDE が前面 / NVIDIA PhysX が背後
ROBOGUIDE の UI はそのまま。
背後の物理演算が NVIDIA PhysX に差し替わる。
[ROBOGUIDE UI] ←操作→ [ROBOGUIDE Core]
↓ 物理計算委譲
[NVIDIA PhysX]
↓ 結果返却
[ばら積み / ケーブル / かん合]
これまで ROBOGUIDE が苦手だったばら積み取り出し / 柔軟物(ケーブル)/ かん合作業が、高精度に再現される。
ROBOGUIDE を使い慣れた現場は、UI 変更ゼロでこの恩恵を取れる。
パターンB: Isaac Sim が前面 / ROBOGUIDE が背後
Isaac Sim のフォトリアル仮想工場の中に、ファナックロボを置く。
動作の中身は ROBOGUIDE が計算する。
[Isaac Sim 仮想工場] ←表示→ [Omniverse / OpenUSD]
↑ ↓
[教示操作盤] [ROBOGUIDE Core]
(実機 or 仮想) ↓ 軌跡計算
[実機同等のサイクルタイム]
このパターンBが、本記事の中心メッセージ「教示の机上完結」の正体だ。
実機同等の軌跡とサイクルタイムを、フォトリアルな仮想ラインの中で確認できる。
全機種が OpenUSD SimReady アセット化
可搬3kg の CRX 協働ロボから、可搬2,300kg の超大型まで。
ファナックロボ全シリーズが OpenUSD SimReady アセットとして整備された。
NVIDIA 側のスタックは以下:
| 役割 | コンポーネント |
|---|---|
| シミュ環境 | Isaac Sim |
| 学習FW | Isaac Lab |
| 3D共通基盤 | Omniverse + OpenUSD |
| 物理 | PhysX |
| 基盤モデル | Isaac GR00T N |
ロボ本体は揃った。
あとは自社治具・搬送・センサを OpenUSD 化できるかが、現場側の宿題になる。
ここを後回しにすると、仮想工場は「ロボだけ動く空っぽの箱」になる(落とし穴で詳述)。
姉妹発表との連立: Gemini=脳、NVIDIA=練習場、ファナック=身体
ここが本記事のもう一つの中心だ。
今回の NVIDIA 連携は、単独で読むと意味が半分になる。
2026-05-13: Gemini 協業 → 2026-05-15: NVIDIA 連携強化
中2日。
ファナックは異例のスピードで二つの発表を連続させた。
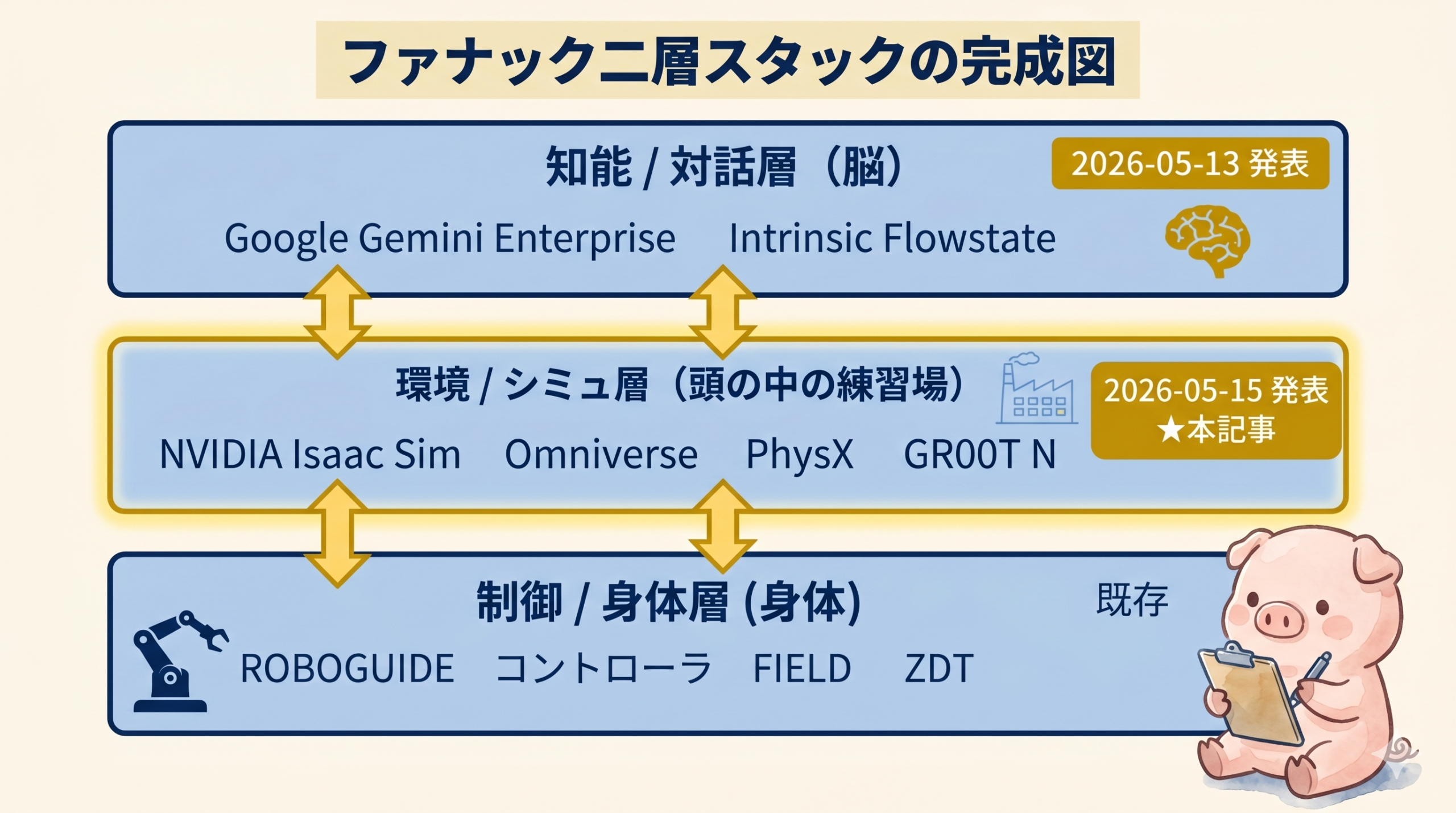
| 日付 | 相手 | 担当層 |
|---|---|---|
| 2026-05-13 | Google Gemini Enterprise + Intrinsic Flowstate | 知能 / 対話層 |
| 2026-05-15 | NVIDIA Isaac Sim + Omniverse + PhysX | 環境 / シミュ層 |
| 既存 | ROBOGUIDE / コントローラ / FIELD / ZDT | 制御層 |
詳細は姉妹記事「ファナックがGoogle Geminiを搭載した本当の意味」で深掘っている。
本記事と併せて読むと、ファナックの戦略地図が一枚で見える。
二層スタックの完成図
┌────────────────────────────────────────┐
│ 知能 / 対話層 Google Gemini │ ← 2026-05-13
│ (脳) Intrinsic Flowstate │
├────────────────────────────────────────┤
│ 環境 / 練習場層 NVIDIA Isaac Sim │ ← 2026-05-15 ★本記事
│ (頭の中の練習場) Omniverse + PhysX │
├────────────────────────────────────────┤
│ 制御 / 身体層 ROBOGUIDE │
│ (身体) コントローラ / ZDT │
└────────────────────────────────────────┘
Gemini が「何をするか」を理解し(脳)、
Isaac Sim の中で「どう動くか」を練習し(練習場)、
ROBOGUIDE で実機が動く(身体)。
この三層が、ファナック1社のスタックで完結し始めた。
ABB / Yaskawa / Siemens いずれも、ここまでの統合は未到達だ。
中小製造業の “1人デジタルツイン” 最小構成
「うちでは無理だろう」という感覚が、今回の発表でズレ始めている。
NVIDIA Isaac Sim は 個人利用 / 2ユーザーまで無料。
ROBOGUIDE は既存のリース契約がそのまま使える。
追加で必要なのは GPU だけ、というのが今回の構成最大の特徴だ。
GPU は RTX 5080 (約30万) が現実解
| 区分 | スペック | コメント |
|---|---|---|
| 最低 | RTX 3060 | VRAM 不足。実用厳しい |
| 実用入門 | GeForce RTX 5080 / VRAM 16GB / SSD 500GB | テグシス 2025-09 推奨 |
| 推奨 | RTX 4080 以上 / VRAM 16GB+ | フォトリアル余裕 |
| 理想 | RTX PRO 6000 Blackwell / VRAM 96GB | NVIDIA公式 |
価格目安:
| 項目 | 価格 | 出典 |
|---|---|---|
| RTX 5080 単体 | 198,000〜299,800円 | 価格.com 2026 |
| Ai Compute BOX mini (RTX 5080搭載) | 1,127,400円 (税抜) | ascii.jp 2025-11 |
| Isaac Sim (2人まで) | 無料 | NVIDIA公式 |
| DT PoC 一般相場 | 数百万〜数千万円 | TMCシステム 2026 |
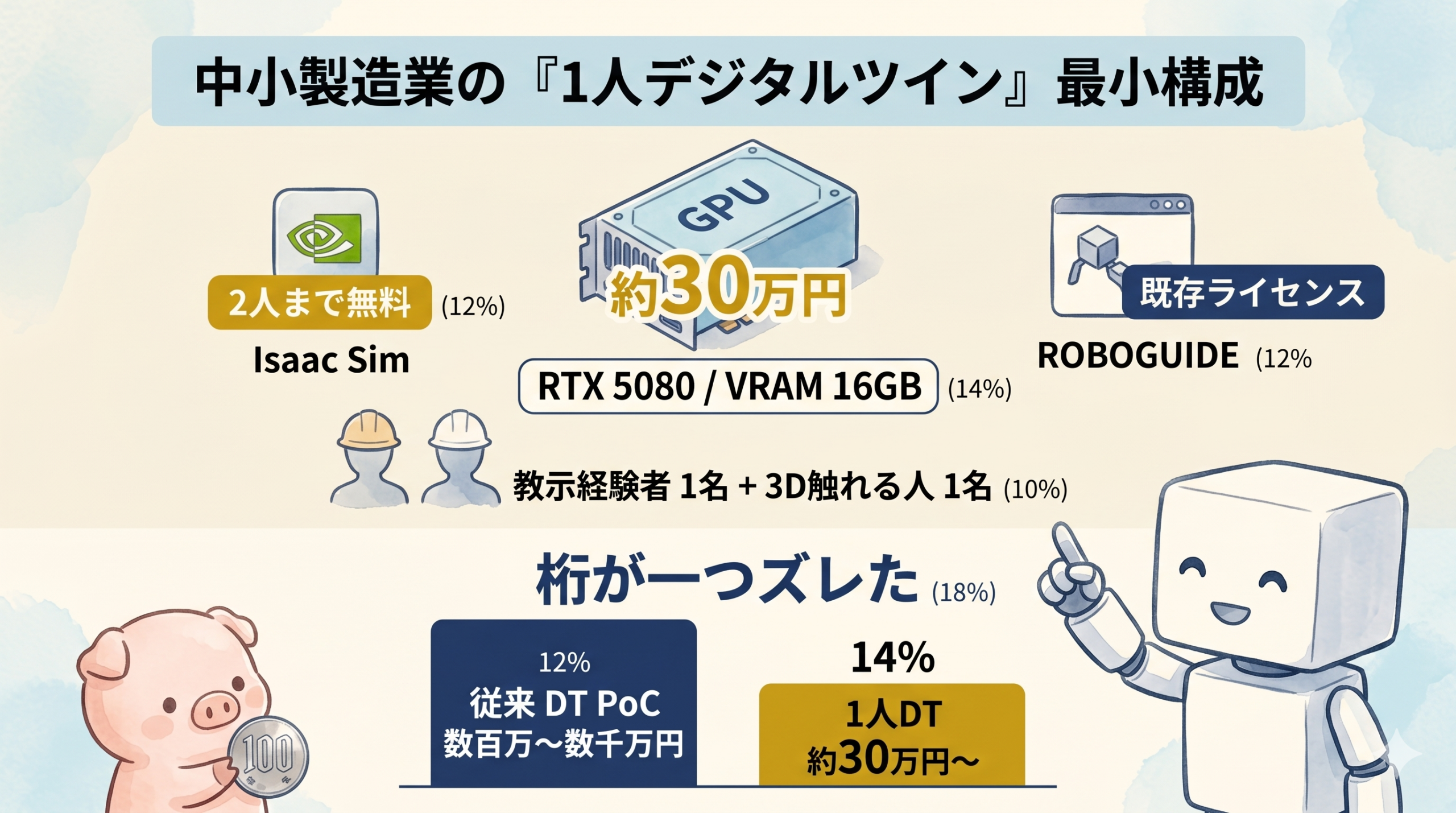
つまり、ハード30万円から着手できる。
従来 DT PoC が数百万〜数千万だったことを考えると、桁が一つズレた。
「経営承認を待たずに、1人のエンジニアが机上で始められる」
これが1人デジタルツインのラインだ。
ただし、ここに最大級の落とし穴がある
業務用GPUなら強いだろうと H100 / A100 を選ぶと、Isaac Sim が動かない。
Isaac Sim は RT Core 必須だが、H100 / A100 には RT Core が無い。
数百万円のサーバーを買った後で気付くと、目も当てられない。
Isaac Sim 用 GPU は、データセンター系ではなく RTX 系を選ぶ。
もう一つの壁がライセンスだ。
個人利用は2ユーザーまで無料だが、3ユーザー目から Omniverse Enterprise が必須になる。
「とりあえず社内3人で触ろう」とした瞬間に、契約が発生する。
導入の落とし穴 7パターン
ここまでで「技術は強い、ハードは30万」と整理した。
だが PoC が死蔵する原因は、ほとんどが運用と組織側にある。
直近3か月のレポートから抽出した落とし穴を7つ並べる。
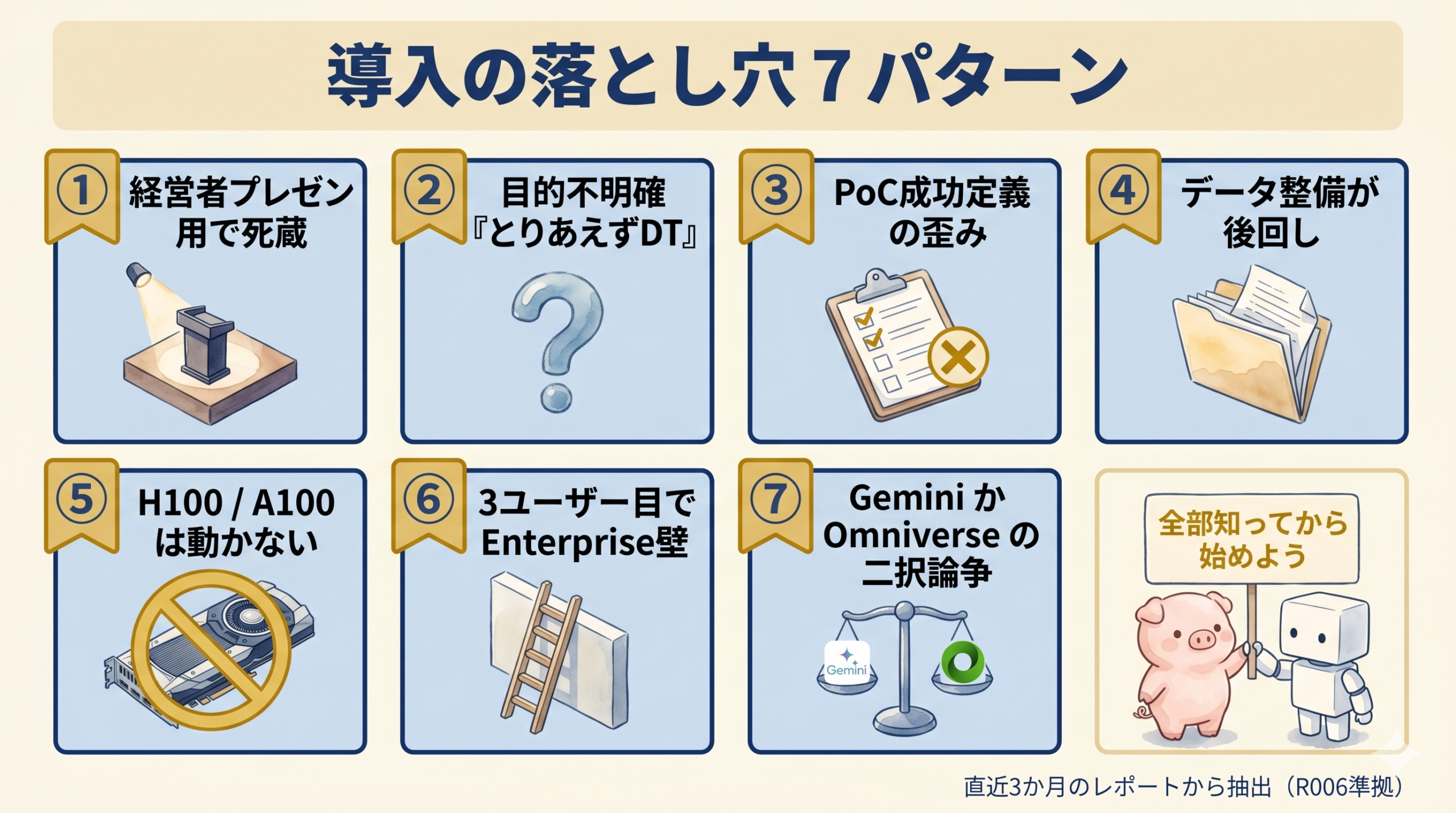
① 「経営者プレゼン用」で終わる罠
役員報告で見栄えのする3Dシミュを作って終わり。
現場が教示盤を握る運用に落ちなければ、PoC は確実に死蔵する(NTT DATA 2026-05 で類似指摘)。
② 目的不明確 「とりあえずDT」
何を最適化するか定義せずに着手。
「教示工数を月X時間減らす」「段取り替えをY時間にする」レベルの KPI を先に置く。
③ PoC 成功定義の歪み
仮想で動いた=成功、と判定してしまう。
現場のネット環境、教示者のスキル、ペンダント操作習慣の検証を飛ばすと、本番で崩壊する。
④ データ整備が後回し
OpenUSD SimReady でロボ本体は揃っても、自社の治具・搬送・センサが USD 化されていなければ仮想工場は空っぽ。
USD 化の段取りを「ロボ導入前」ではなく「現場棚卸し」から始める。
⑤ GPU を「業務用 H100」で揃える
前述。RT Core 必須。H100 / A100 は Isaac Sim 非対応。
発注前に必ず Isaac Sim のRequirementsページを開く。
⑥ 3ユーザー目で気付く Enterprise ライセンスの壁
個人利用(2人)感覚で社内展開した瞬間、Omniverse Enterprise 契約が発動。
社内展開計画 = ライセンス計画として最初から立てる。
⑦ 「Gemini か Omniverse か」の二択論争
姉妹発表との関係を理解せず議論が紛糾。
両方を二層スタックで使うのがファナックの戦略。社内会議で二択にしないこと。
中小工場が「いま」始める3ステップ
足を一歩出すための具体手順を3つに圧縮する。
Step 1. まず “仮想工場” を体験する(経営層+現場)
Isaac Sim はインストールから動くまで数日かかる。
意思決定を待つ前に、VR/メタバース型の仮想工場体験で「フォトリアル仮想工場とは何か」を全員のイメージに揃えるのが早い。
仮想工場の感触を社内研修やショールームで先に味わわせるなら、メタバース工場体験ができる
🤖 ChatGPT/Claude/Geminiを1契約で使い倒す
主要な生成AIを1つの契約で集約できるBtoB SaaS DoraVerse。ChatGPT/Claude/Gemini を都度切り替える手間と、複数サブスク代を一気に削減。14日間無料トライアルあり。
▶ ChatGPTもClaudeもGeminiも。主要AIを実質無料で14日間使い倒すDoraverseトライアル
※月額¥10 USD〜のスタータープランから・年額プランで割引・どこでもリンク対応
のような環境を、社内デモの叩き台にする手がある。VR ゴーグル1台で済むので、稟議のハードルも低い。
Step 2. GPU と教示者の体制を整える(技術側)
- GPU: RTX 5080 / VRAM 16GB / SSD 500GB(約30万円)
- 体制: 教示経験者1名 + USD/3D に触れる人1名(2人まで無料)
- ライセンス: Isaac Sim 個人利用 + 既存 ROBOGUIDE
GPU ホスティング / Docker / オンプレ AI の足回りを社外に置くなら、
🖥️ Claude Codeで作ったアプリを本格運用するなら
Streamlit/FastAPI/n8n/Difyなどを自由に立てて試したい開発・テスト用途には ConoHa VPSが最適。1.3円/時間〜でroot権限OK・最低利用期間なし・必要な間だけ起動して停止OK。
▶ VPSで色々なことを試したいなら【ConoHa VPS】がお薦め!
![]()
※時間課金プランなら検証だけで停止すれば数十円で完結
のような VPS でまず Isaac Lab の学習側だけクラウドに逃がす手もある(推論はオンプレ GPU)。
Step 3. Omniverse は重い。並走で “事務系の自走化” を先に終わらせる
Isaac Sim 構築は数か月仕事。
その間、ライン停止損失と熟練者拘束は止まらない。
並走で現場の事務作業を Claude Code で90日自走化しておくと、Omniverse 本格運用が立ち上がる頃には、社内のAI受容度が一段上がっている。
Claude Code 伴走の標準コースは
🥷 Claude Code を本気で社内導入するなら
「自社の業務を Claude Code で自動化したいが何から手をつけるか分からない」中小製造業向けの伴走型トレーニング AI鬼管理。無料の業務効率化診断 (オンライン面談) で、自社のどこから自動化できるかが見える化される。
▶ AI鬼管理 | Claude Code活用の業務自動化トレーニング 無料診断を予約する
※公式LINE経由でも申込可・診断のみで無理な勧誘なし
あたりが、90日スパンの設計と相性がいい。
「フィジカルAI本体は重い」
「だから足慣らしは事務系で済ませる」
この順番が、中小製造業のDT成功確率を一番上げる。
まとめ
| 軸 | 従来 | 2026-05-15 以降 |
|---|---|---|
| 教示 | 現場でライン停止 | 想定値: 机上完結・停止ゼロ |
| シミュ | ROBOGUIDE 単独 | + Isaac Sim 双方向統合 |
| GPU | 数百万のサーバー | RTX 5080 約30万から |
| ライセンス | エンタープライズ前提 | 2人まで無料 |
| スタック | バラバラの3層 | 脳(Gemini)+ 練習場(NVIDIA)+ 身体(ファナック) |
ファナックは 2026-05-13 と 2026-05-15 の中2日で、二層スタックの絵を完成させた。
ロボメーカー自身がこの絵を出してきたのは初めてだ。
次の3年、現場に問われるのは「教示者をペンダントに縛り続けるのか、机上で完結させるのか」のシンプルな選択になる。
参照:
– ファナック公式 ROBOGUIDE × Omniverse
– MONOist 2026-05-18 報
– Isaac Sim Requirements
– テグシス GPU選定ガイド 2025-09
– 姉妹記事: ファナック × Google Gemini


コメント