机の上で、架空の工場を一台ずつ建てている。前回は、メーカーが公開する外形寸法図から協働ロボットのアームを起こして動かした。今回はその先、「手」だ。腕の先に2爪のグリッパ(ハンド)を付け、物を掴んで運ぶ動きまで通した。寸法は図面の数字だけを使い、製品名やロゴは出していない。
外形図から2爪グリッパを起こす
ハンドもアームと同じ作り方だ。メーカーが公開する外形寸法図から、全高や開き幅、取付穴の寸法を拾い、Fusion 360で形を起こす。図面はPDFを画像にして、数字を一つずつ確かめていく。
ここで守っているのは、図面を寸法の出所としてだけ使うこと。型番やロゴは3Dにもこの記事にも出さない。あくまで「こういう寸法の2爪グリッパ」という形と数字だけを借りている。
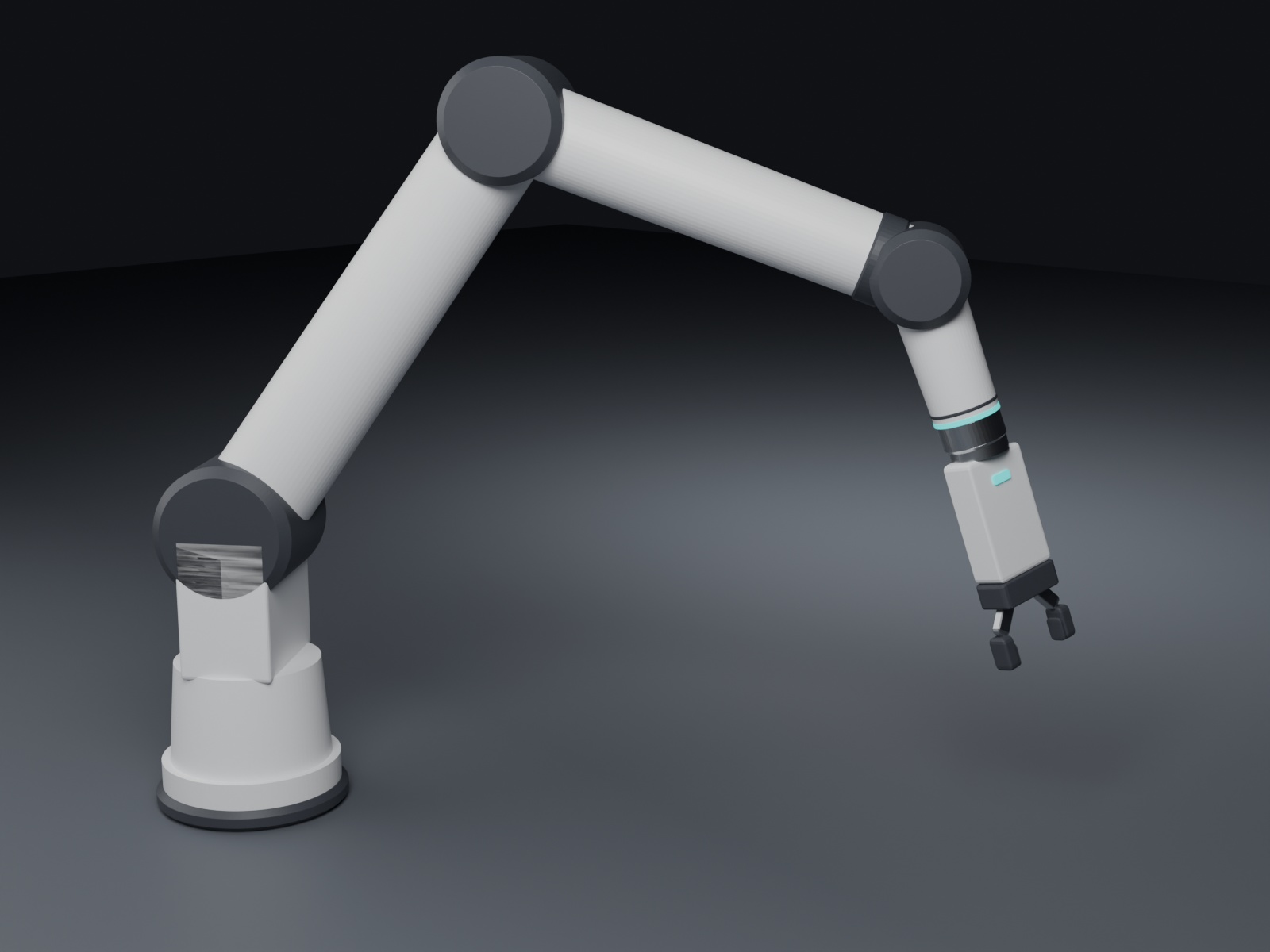
手首のフランジに寸法精度で取り付ける
難しいのは「どこに・どの向きで」付けるかだ。すでにあるアームの3Dデータから、手首の関節中心から取付面へ向かう向き(ツール軸)を割り出し、それにハンドの軸を合わせた。取付面の直径は約63mmで、図面の値とぴたり一致した。
勘で置くのではなく、既存の形状から測って合わせる。この一手間が、後の見栄えと正確さを決める。
ハンドと手首の隙間を消す
最初の取り付けでは、ハンドと手首の間にわずかな隙間ができた。原因は、ハンド側の継手を手首から少し離し、しかも本体側にしか伸ばしていなかったことだ。
そこで継手を手首側へ延長して少し重ねた。同じ金属の見た目なので、継ぎ目なく一体につながる。下の拡大図のとおり、隙間は消えた。

「掴む」動きを付ける
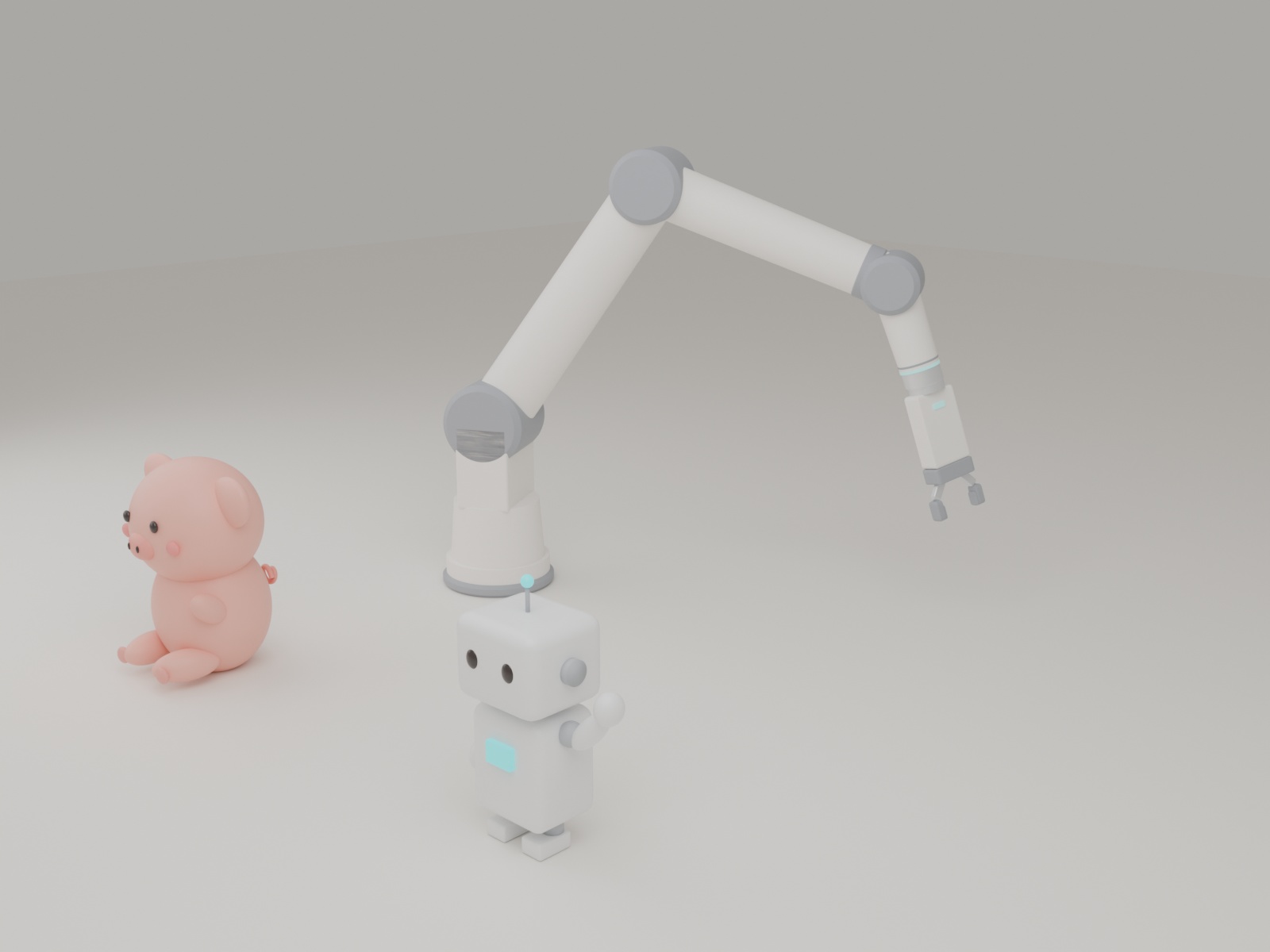
2本の指を、付け根を軸に開閉できるように仕込んだ。アームの動きと同期させ、物を取るときに閉じ、置くときに開く流れにしている。指は手首と一緒に動くので、どんな姿勢でも掴む向きがズレない。
下の動画は、その掴む動作を入れた20秒版だ。
補足:ロボットの「手(エンドエフェクタ)」は、本体とは別に選んで付け替えるのが普通だ。本体とハンドを別々に起こし、取付面で正確に合わせるという今回の進め方は、実機の組み合わせ方とそのまま重なる。
机の上のロボットが、手を得た
精度はCAD、説得力はビジュアル。外形図さえあれば、アームも手も同じ手順で起こせて、取り付けて、動かせる。机の上のロボットが、ついに物を掴む手を得た。
次は、この手で箱をつかんで運ぶ動作を、すでに作ってある搬送ラインと組み合わせたい。図面から起こし、合わせ、動かす。その積み重ねを一本ずつ記録していく。


コメント